State variables for micromechanical models. More...
#include <statevariable.hpp>
Public Member Functions | |
| StateVariable (int size=37) | |
| Constructor. | |
| StateVariable (const StateVariable &sv) | |
| Copy constructor. | |
| StateVariable (StateVariable &&sv) noexcept | |
| Move constructor. | |
| virtual | ~StateVariable ()=default |
| destructor | |
| StateVariable & | operator= (const StateVariable &sv) |
| Copy assignment operator. | |
| StateVariable & | operator= (StateVariable &&sv) noexcept |
| Move assignment operator. | |
| void | revertSymmetricContactStateVariables (int idx, const std::vector< std::string > &cscalars={}, const std::vector< std::string > &cvectors={}) |
| Revert contact force, displacement and specified custom variables by multiplying them with -1. | |
| std::size_t | hash (const Eigen::Matrix< T, 3, 1 > &dfi, int idx, const int precision=15, bool symmetric=false, const std::vector< std::string > &cscalars={}, const std::vector< std::string > &cvectors={}) |
| Hash the state variables at the integration point with index idx. | |
| void | copyContactStateVariables (int from_idx, int to_idx, bool symmetric=false, const std::vector< std::string > &cscalars={}, const std::vector< std::string > &cvectors={}) |
| Deep copy the contact state variables from one integration point to another. | |
| void | copyToRawPointer (T *ptr, const bool dispp, const bool cscalars, const bool cvectors, const int nstatev) |
| Copy state variables to a raw pointer for ABAQUS UMAT/VUMAT interfaces. | |
| void | copyFromRawPointer (T *ptr, const bool dispp, const bool cscalars, const bool cvectors, const int nstatev) |
| Copy state variables from a raw pointer for ABAQUS UMAT/VUMAT interfaces. | |
| Eigen::Matrix< T, 3, 3 > | Fij () const |
| Get the fabric tensor as a matrix. | |
| T | F11 () const |
| Get the fabric tensor component F11. | |
| T | F22 () const |
| Get the fabric tensor component F22. | |
| T | F33 () const |
| Get the fabric tensor component F33. | |
| T | F12 () const |
| Get the fabric tensor component F12. | |
| T | F13 () const |
| Get the fabric tensor component F13. | |
| T | F23 () const |
| Get the fabric tensor component F23. | |
| T | ar () const |
| Get the degree of fabric anisotropy. | |
| Eigen::Matrix< T, 3, 3 > | Aij () const |
| Get the fabric tensor A as a matrix. | |
| T | A11 () const |
| Get the fabric tensor component A11. | |
| T | A22 () const |
| Get the fabric tensor component A22. | |
| T | A33 () const |
| Get the fabric tensor component A33. | |
| T | A12 () const |
| Get the fabric tensor component A12. | |
| T | A13 () const |
| Get the fabric tensor component A13. | |
| T | A23 () const |
| Get the fabric tensor component A23. | |
| Eigen::Matrix< T, 3, 3 > | FNij () |
| Get the fabric tensor of contact normal force. | |
| T | FN11 () |
| Get the fabric tensor of contact normal force component FN11. | |
| T | FN22 () |
| Get the fabric tensor of contact normal force component FN22. | |
| T | FN33 () |
| Get the fabric tensor of contact normal force component FN33. | |
| T | FN12 () |
| Get the fabric tensor of contact normal force component FN12. | |
| T | FN13 () |
| Get the fabric tensor of contact normal force component FN13. | |
| T | FN23 () |
| Get the fabric tensor of contact normal force component FN23. | |
| T | an () |
| Get the degree of fabric anisotropy of contact normal force. | |
| Eigen::Matrix< T, 3, 3 > | FTij () |
| Get the fabric tensor of contact shear force. | |
| T | FT11 () |
| Get the fabric tensor of contact shear force component FT11. | |
| T | FT22 () |
| Get the fabric tensor of contact shear force component FT22. | |
| T | FT33 () |
| Get the fabric tensor of contact shear force component FT33. | |
| T | FT12 () |
| Get the fabric tensor of contact shear force component FT12. | |
| T | FT13 () |
| Get the fabric tensor of contact normal force component FT13. | |
| T | FT23 () |
| Get the fabric tensor of contact shear force component FT23. | |
| T | at () |
| Get the degree of fabric anisotropy of contact shear force. | |
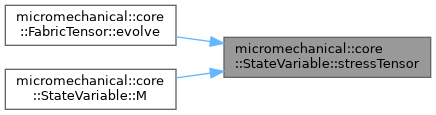
| Tensor2< T > | stressTensor () const |
| Get the stress tensor. | |
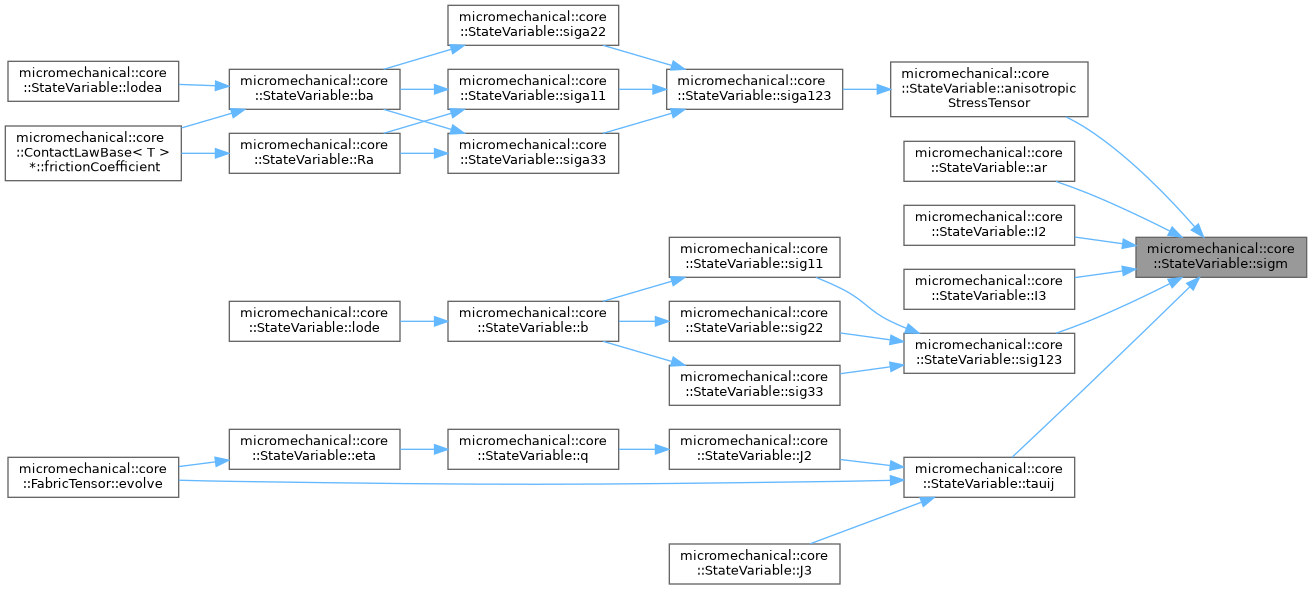
| Eigen::Matrix< T, 3, 3 > | sigm () const |
| Get the stress tensor. | |
| Eigen::Matrix< T, 3, 3 > | sigkk () const |
| Get the mean stress tensor. | |
| Eigen::Matrix< T, 3, 3 > | tauij () const |
| Get the deviatoric stress tensor. | |
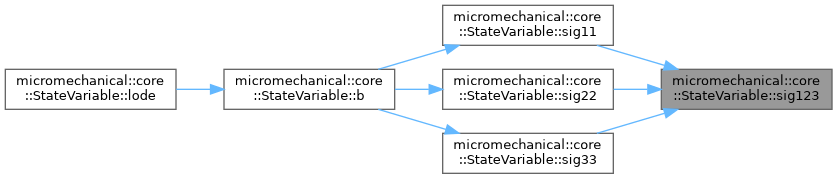
| Eigen::Matrix< T, 3, 1 > | sig123 () const |
| Get the principal stresses. | |
| T | sig11 () const |
| Get the first principal stress. | |
| T | sig22 () const |
| Get the second principal stress. | |
| T | sig33 () const |
| Get the third principal stress. | |
| T | b () const |
| Get the lode parameter. | |
| T | lode () const |
| Get the lode angle. | |
| Tensor2< T > | anisotropicStressTensor () const |
| anisotropic stress tensor | |
| Eigen::Matrix< T, 3, 1 > | siga123 () const |
| Principal stresses with anisotropy. | |
| T | siga11 () const |
| First principal stress with anisotropy. | |
| T | siga22 () const |
| Second principal stress with anisotropy. | |
| T | siga33 () const |
| Third principal stress with anisotropy. | |
| T | ba () const |
| Lode parameter with anisotropy. | |
| T | Ra () const |
| Major stress ratio siga1/siga3. | |
| T | lodea () const |
| Lode angle with anisotropy. | |
| Tensor2< T > | strainTensor () const |
| Get the strain tensor. | |
| Eigen::Matrix< T, 3, 3 > | epsm () const |
| Get the strain tensor. | |
| Eigen::Matrix< T, 3, 3 > | epskk () const |
| Get the mean strain tensor. | |
| Eigen::Matrix< T, 3, 3 > | epsij () const |
| Get the deviatoric strain tensor. | |
| Tensor2< T > | plasticStrainTensor () const |
| Get the plastic strain tensor. | |
| Eigen::Matrix< T, 3, 3 > | epspm () const |
| Get the plastic strain tensor. | |
| Eigen::Matrix< T, 3, 3 > | epspkk () const |
| Get the mean plastic strain tensor. | |
| Eigen::Matrix< T, 3, 3 > | epspij () const |
| Get the deviatoric plastic strain tensor. | |
| Tensor2< T > | plasticDisplacementStrainTensor () const |
| Get the plastic strain tensor from displacements. | |
| Eigen::Matrix< T, 3, 3 > | epspum () const |
| Get the plastic strain tensor from displacements. | |
| Eigen::Matrix< T, 3, 3 > | epspukk () const |
| Get the mean plastic strain tensor from displacements. | |
| Eigen::Matrix< T, 3, 3 > | epspuij () const |
| Get the deviatoric plastic strain tensor from displacements. | |
| T | I1 () const |
| Get the first invariant of the stress tensor. | |
| T | I2 () const |
| Get the second invariant of the stress tensor. | |
| T | I3 () const |
| Get the third invariant of the stress tensor. | |
| T | J2 () const |
| Get the second invariant of the deviatoric stress tensor. | |
| T | J3 () const |
| Get the third invariant of the deviatoric stress tensor. | |
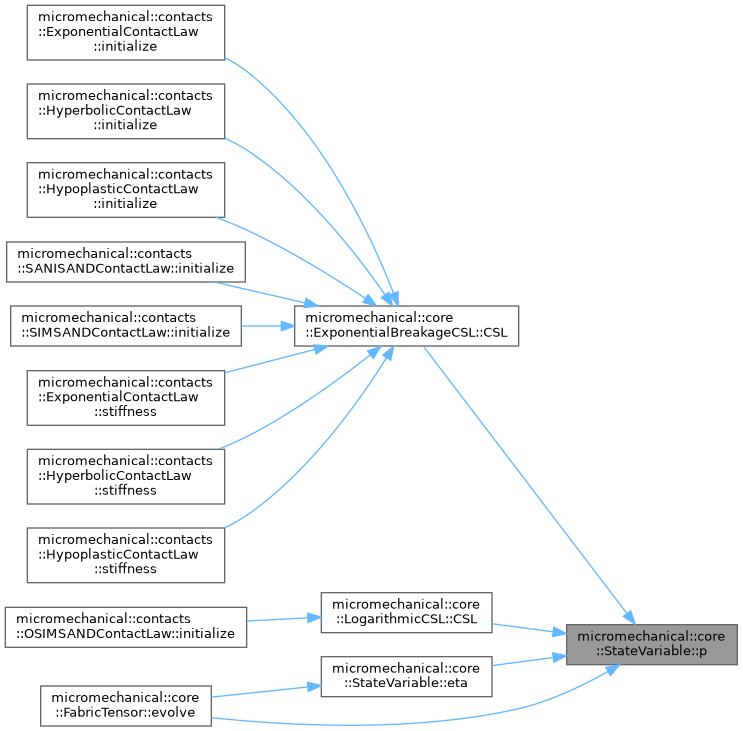
| T | p () const |
| Get the mean stress. | |
| T | q () const |
| Get the deviatoric stress. | |
| T | Mc () const |
| Get the slope of the critical state line for extension. | |
| T | Me () const |
| Get the slope of the critical state line for extension. | |
| T | M () const |
| Get the slope of the critical state line. | |
| T | eta () const |
| Get the stress ratio. | |
| T | epsva () const |
| Get the volumetric strain approximation. | |
| T | epsv () const |
| Get the volumetric strain. | |
| T | epsa () const |
| Get the axial strain. | |
| T | epsd () const |
| Get the general shear strain. | |
| T | eeq () const |
| Get the equivalent strain. | |
| T | epspv () const |
| Get the plastic volumetric strain. | |
| T | epspva () const |
| Get the plastic volumetric strain. | |
| T | epspa () const |
| Get the plastic axial strain. | |
| T | epspd () const |
| Get the general plastic shear strain. | |
| T | peeq () const |
| Get the equivalent plastic strain. | |
| T | epspuv () const |
| Get the plastic volumetric strain from displacements. | |
| T | epspuva () const |
| Get the plastic volumetric strain from displacements. | |
| T | epspua () const |
| Get the plastic axial strain from displacements. | |
| T | epspud () const |
| Get the general plastic shear strain from displacements. | |
| T | pueeq () const |
| Get the equivalent plastic strain from displacements. | |
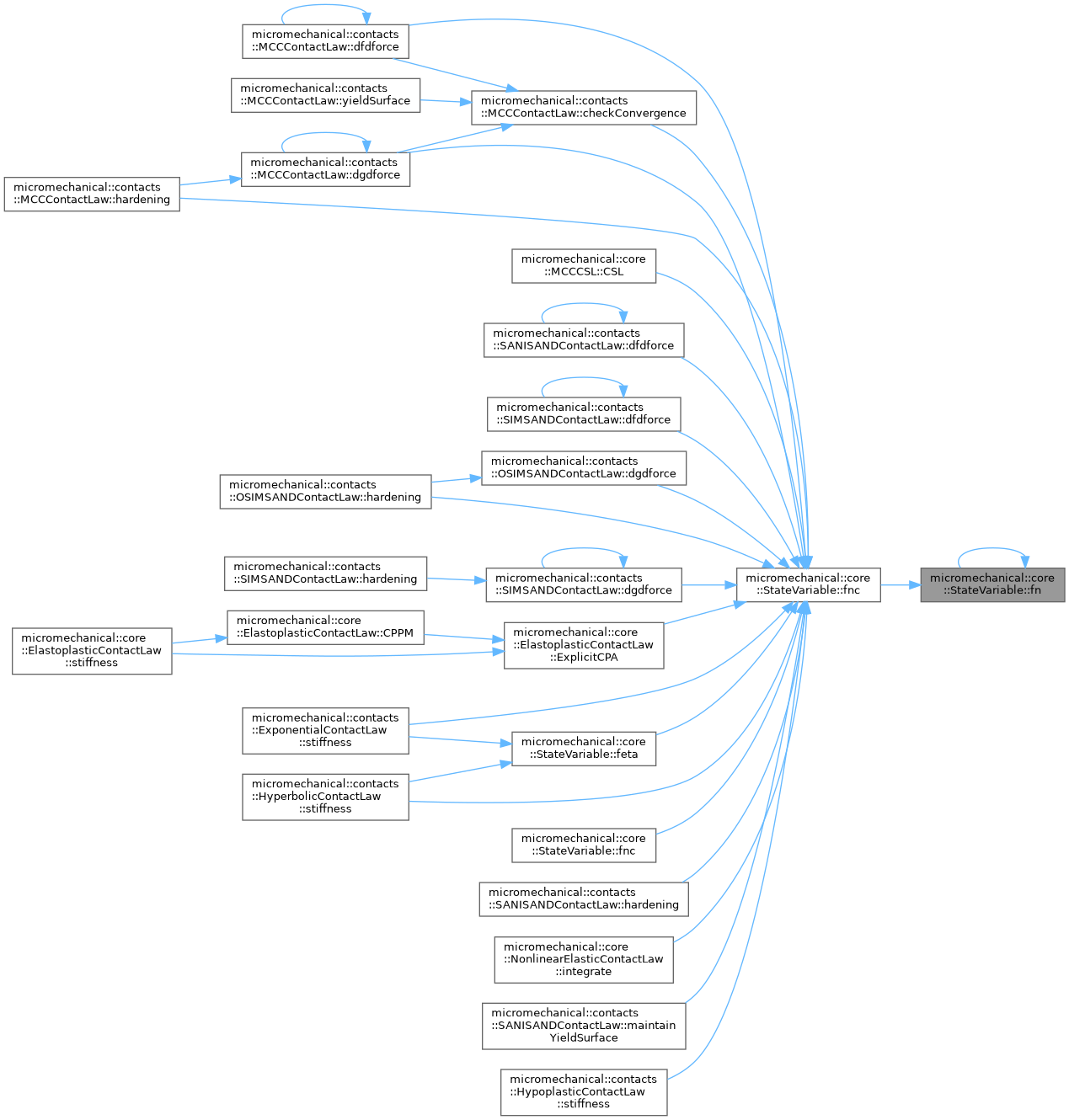
| T | fn (int idx) const |
| Get the normal force. | |
| Eigen::Matrix< T, Eigen::Dynamic, 1 > | fn () const |
| T | fnc (const int idx, T cohesion=0.0) const |
| Get the normal force with minimal adhesive force. | |
| Eigen::Matrix< T, Eigen::Dynamic, 1 > | fnc (T cohesion=0.0) const |
| T | fs (int idx) const |
| Get the shear force at the first direction. | |
| Eigen::Matrix< T, Eigen::Dynamic, 1 > | fs () const |
| T | ft (int idx) const |
| Get the shear force at the second direction. | |
| Eigen::Matrix< T, Eigen::Dynamic, 1 > | ft () const |
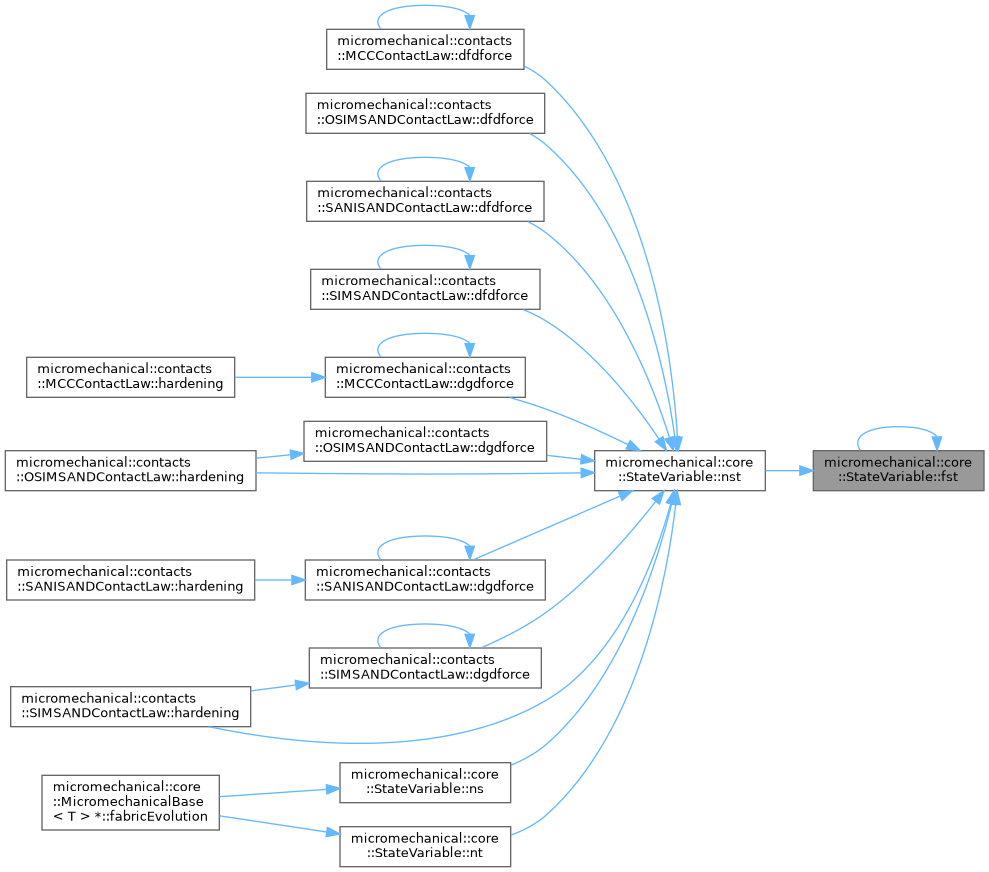
| Eigen::Matrix< T, 2, 1 > | fst (int idx) const |
| Get the shear force at both directions. | |
| Eigen::Matrix< T, Eigen::Dynamic, 2 > | fst () const |
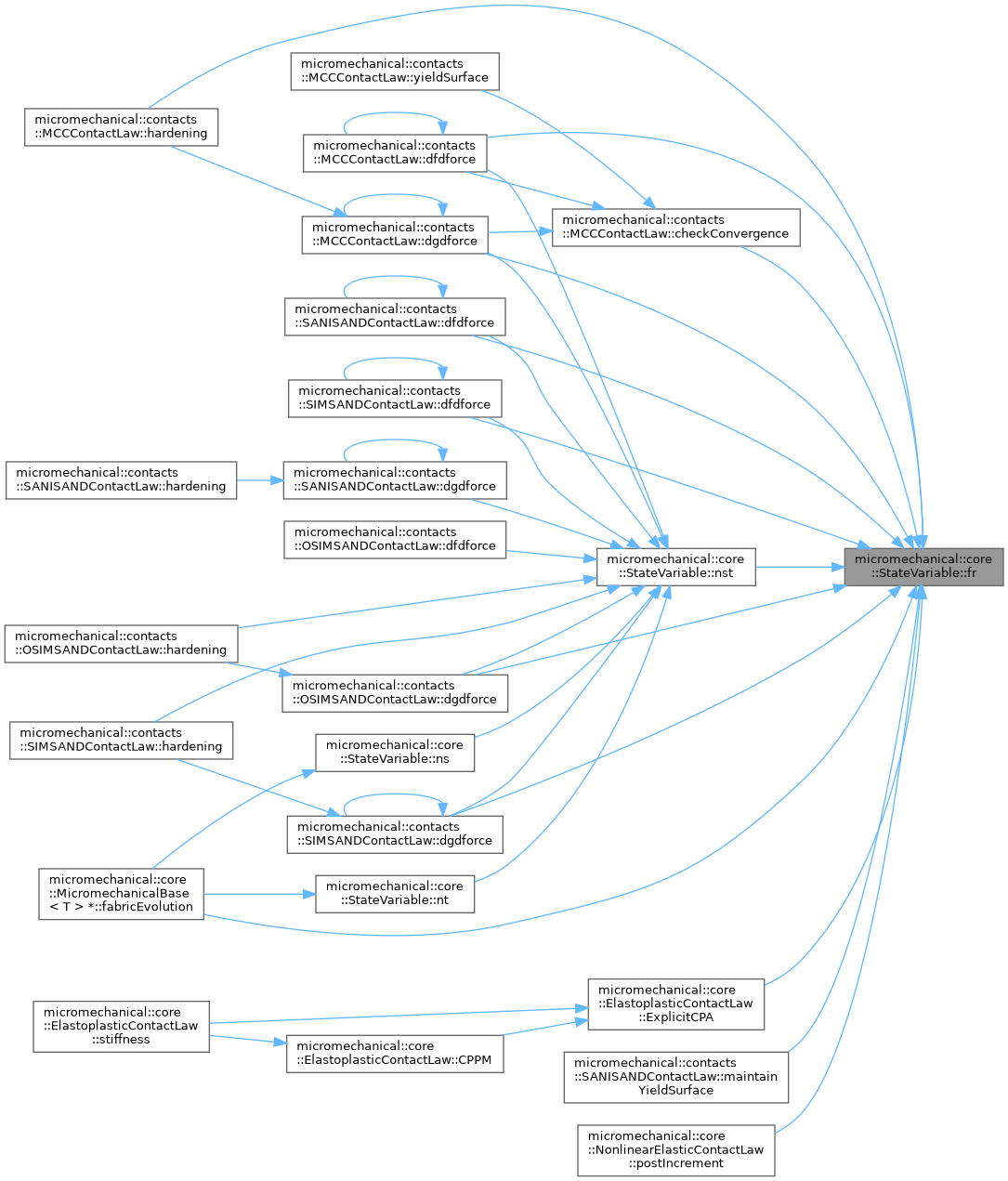
| T | fr (int idx) const |
| Get the shear force. | |
| Eigen::Matrix< T, Eigen::Dynamic, 1 > | fr () const |
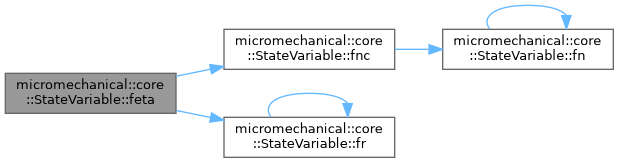
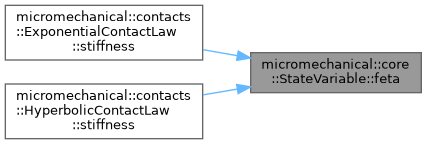
| T | feta (const int idx) const |
| Get the shear force ratio. | |
| Eigen::Matrix< T, Eigen::Dynamic, 1 > | feta () const |
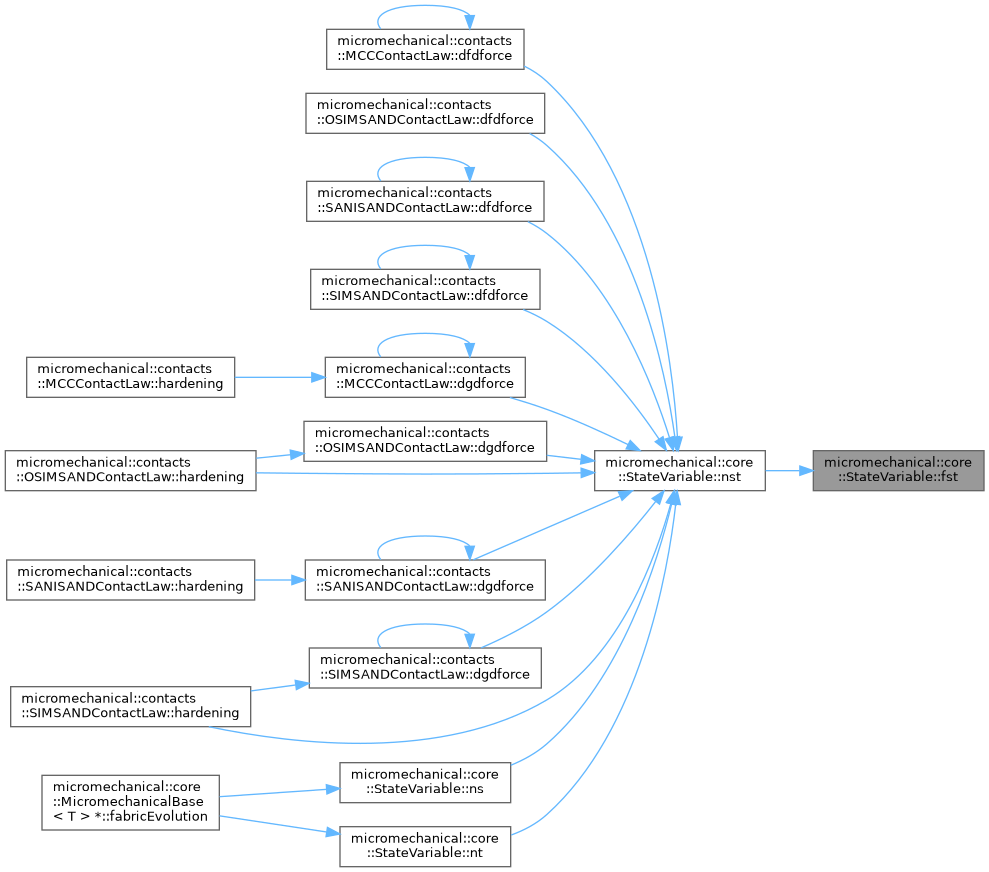
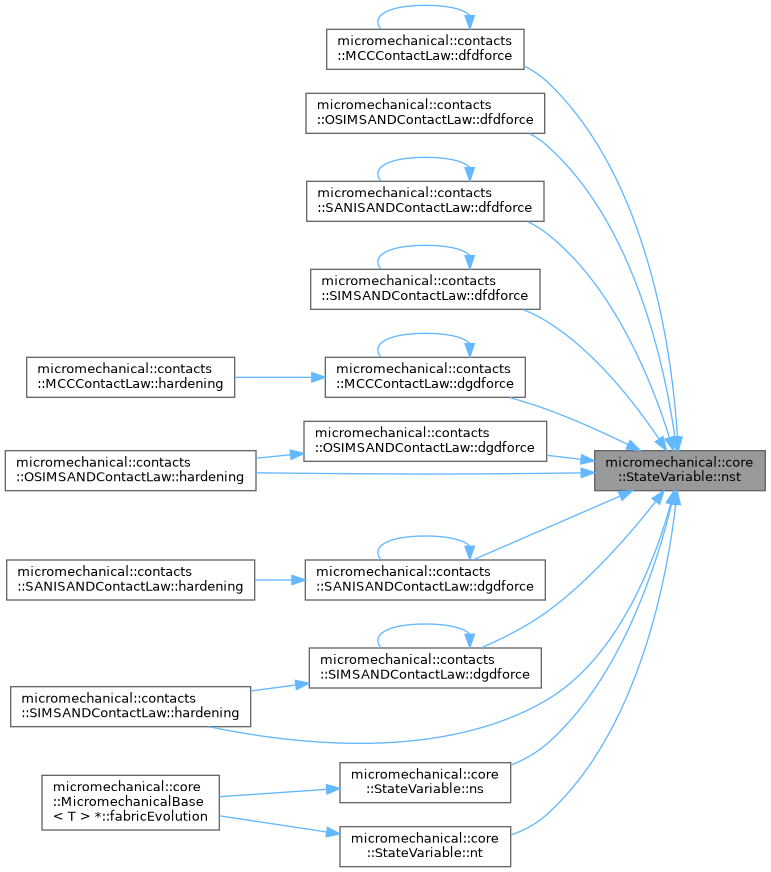
| Eigen::Matrix< T, 2, 1 > | nst (int idx) const |
| Get the shear force direction. | |
| T | ns (const int idx) const |
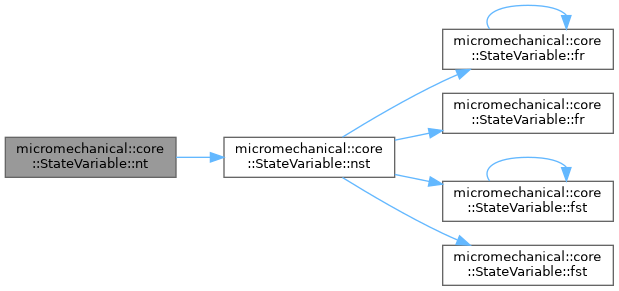
| T | nt (int idx) const |
| T | un (int idx) const |
| Get the normal displacement. | |
| Eigen::Matrix< T, Eigen::Dynamic, 1 > | un () const |
| T | us (int idx) const |
| Get the shear displacement at the first direction. | |
| Eigen::Matrix< T, Eigen::Dynamic, 1 > | us () const |
| T | ut (int idx) const |
| Get the shear displacement at the second direction. | |
| Eigen::Matrix< T, Eigen::Dynamic, 1 > | ut () const |
| Eigen::Matrix< T, 2, 1 > | ust (int idx) const |
| Get the shear displacement at both directions. | |
| Eigen::Matrix< T, Eigen::Dynamic, 2 > | ust () const |
| T | ur (int idx) const |
| Get the shear displacement. | |
| Eigen::Matrix< T, Eigen::Dynamic, 1 > | ur () const |
| T | upn (int idx) const |
| Get the plastic normal displacement. | |
| Eigen::Matrix< T, Eigen::Dynamic, 1 > | upn () const |
| T | ups (int idx) const |
| Get the plastic shear displacement at the first direction. | |
| Eigen::Matrix< T, Eigen::Dynamic, 1 > | ups () const |
| T | upt (int idx) const |
| Get the plastic shear displacement at the second direction. | |
| Eigen::Matrix< T, Eigen::Dynamic, 1 > | upt () const |
| Eigen::Matrix< T, 2, 1 > | upst (int idx) const |
| Get the plastic shear displacement at both directions. | |
| Eigen::Matrix< T, Eigen::Dynamic, 2 > | upst () const |
| T | upr (int idx) const |
| Get the plastic shear displacement. | |
| Eigen::Matrix< T, Eigen::Dynamic, 1 > | upr () const |
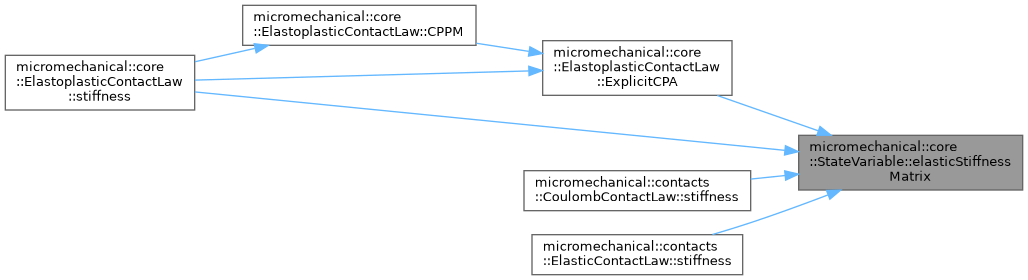
| Eigen::Matrix< T, 3, 3 > | elasticStiffnessMatrix () |
Static Public Member Functions | |
| static int | nStateVariables (const int size=37, const bool dispp=false, const int nstatev_custom=0) |
| Get the number of state variables. | |
| static std::vector< std::string > | stateVariableNames (int size=37, const bool dispp=true, const int nstatev_custom=0) |
| Get the names of the state variables. | |
Public Attributes | |
| T | phi = 0.0 |
| critical friction angle | |
| int | phase = 0 |
| load phase index | |
| int | size = 37 |
| number of the integration points | |
| int | cached_num = 0 |
| cached number of the integration pointsd | |
| Eigen::Matrix< T, 6, 1 > | sig = Eigen::Matrix<T, 6, 1>::Zero() |
| stress vector | |
| Eigen::Matrix< T, 6, 1 > | eps = Eigen::Matrix<T, 6, 1>::Zero() |
| strain vector | |
| Eigen::Matrix< T, 6, 1 > | epsp = Eigen::Matrix<T, 6, 1>::Zero() |
| plastic strain vector | |
| Eigen::Matrix< T, 6, 1 > | epspu = Eigen::Matrix<T, 6, 1>::Zero() |
| plastic strain vector from displacements | |
| Eigen::Matrix< T, 6, 1 > | F = Eigen::Matrix<T, 6, 1>::Zero() |
| fabric vector F | |
| Eigen::Matrix< T, 6, 1 > | A = Eigen::Matrix<T, 6, 1>::Zero() |
| fabric vector F | |
| Eigen::Matrix< T, Eigen::Dynamic, 3 > | force |
| force | |
| Eigen::Matrix< T, Eigen::Dynamic, 3 > | disp |
| displacement | |
| Eigen::Matrix< T, Eigen::Dynamic, 3 > | dispp |
| plastic displacement | |
| Eigen::Matrix< T, Eigen::Dynamic, 1 > | w |
| plastic work | |
| T | e = 0.0 |
| void ratio | |
| T | ec = 0.0 |
| critical void ratio | |
| std::map< std::string, T > | scalars = {} |
| custom scalars | |
| std::map< std::string, Eigen::Matrix< T, Eigen::Dynamic, 1 > > | vectors = {} |
| custom vectors | |
| std::map< std::string, Eigen::Matrix< T, Eigen::Dynamic, 1 > > | cscalars = {} |
| custom contact scalars | |
| std::map< std::string, Eigen::Matrix< T, Eigen::Dynamic, Eigen::Dynamic > > | cvectors = {} |
| custom contact vectors | |
| T | contact_min_normal_force = 1e-10 |
| minimum normal force | |
Detailed Description
struct micromechanical::core::StateVariable< T >
State variables for micromechanical models.
Constructor & Destructor Documentation
◆ StateVariable() [1/3]
|
inlineexplicit |
Constructor.
- Parameters
-
size Number of integration points
References size.
Referenced by operator=(), operator=(), StateVariable(), StateVariable(), and stateVariableNames().
◆ StateVariable() [2/3]
|
inline |

◆ StateVariable() [3/3]
|
inlinenoexcept |
Move constructor.
- Parameters
-
sv State variable
References StateVariable().

◆ ~StateVariable()
|
virtualdefault |
destructor
Member Function Documentation
◆ A11()
|
inline |
◆ A12()
|
inline |
◆ A13()
|
inline |
◆ A22()
|
inline |
◆ A23()
|
inline |
◆ A33()
|
inline |
◆ Aij()
|
inline |
Get the fabric tensor A as a matrix.
- Returns
- Fabric tensor A as a matrix
References micromechanical::math::vec2mat().
Referenced by anisotropicStressTensor().


◆ an()
|
inline |
Get the degree of fabric anisotropy of contact normal force.
- Returns
- Degree of fabric anisotropy of contact normal force
References FNij().

◆ anisotropicStressTensor()
|
inline |


◆ ar()
|
inline |

◆ at()
|
inline |
Get the degree of fabric anisotropy of contact shear force.
- Returns
- Degree of fabric anisotropy of contact shear force
References FTij().

◆ b()
|
inline |


◆ ba()
|
inline |

◆ copyContactStateVariables()
|
inline |
Deep copy the contact state variables from one integration point to another.
- Parameters
-
from_idx Index of the integration point to copy from to_idx Index of the integration point to copy to symmetric Whether to revert the symmetric contact state variables, by default False cscalars Custom scalar fields to be multiplied by -1 cvectors Custom vector fields to be multiplied by -1
References cscalars.
Referenced by micromechanical::core::MicromechanicalBase< T > *::contactIntegrates().

◆ copyFromRawPointer()
|
inline |
Copy state variables from a raw pointer for ABAQUS UMAT/VUMAT interfaces.
- Parameters
-
ptr Raw pointer dispp Include plastic displacements cscalars Include custom scalars cvectors Include custom vectors nstatev Number of state variables
References cscalars, cvectors, disp, dispp, eps, epsp, F, force, sig, and w.
◆ copyToRawPointer()
|
inline |
Copy state variables to a raw pointer for ABAQUS UMAT/VUMAT interfaces.
- Parameters
-
ptr Raw pointer dispp Include plastic displacements cscalars Include custom scalars cvectors Include custom vectors nstatev Number of state variables
References cscalars, cvectors, disp, dispp, eps, epsp, F, force, peeq(), sig, and w.
Referenced by micromechanical::core::MicromechanicalBase< T > *::umat().


◆ eeq()
|
inline |
Get the equivalent strain.
- Returns
- Equivalent strain
References epsij().

◆ elasticStiffnessMatrix()
|
inline |
Referenced by micromechanical::core::ElastoplasticContactLaw< T >::ExplicitCPA(), micromechanical::contacts::CoulombContactLaw< T >::stiffness(), micromechanical::contacts::ElasticContactLaw< T >::stiffness(), and micromechanical::core::ElastoplasticContactLaw< T >::stiffness().
◆ epsa()
|
inline |


◆ epsd()
|
inline |
Get the general shear strain.
- Returns
- General shear strain
References epsa().

◆ epsij()
|
inline |
Get the deviatoric strain tensor.
- Returns
- Deviatoric strain tensor
References epskk(), and epsm().
Referenced by eeq(), and micromechanical::core::FabricTensor< T >::evolve().

◆ epskk()
|
inline |
Get the mean strain tensor.
- Returns
- Mean strain tensor
Referenced by epsij().

◆ epsm()
|
inline |
Get the strain tensor.
- Returns
- Strain tensor
References micromechanical::math::vec2mat().
Referenced by epsa(), epsij(), epsva(), and micromechanical::core::FabricTensor< T >::evolve().

◆ epspa()
|
inline |


◆ epspd()
|
inline |
Get the general plastic shear strain.
- Returns
- General shear strain
References epspa().

◆ epspij()
|
inline |
Get the deviatoric plastic strain tensor.
- Returns
- Deviatoric plastic strain tensor
References epspkk(), and epspm().
Referenced by micromechanical::core::FabricTensor< T >::evolve(), and peeq().


◆ epspkk()
|
inline |
Get the mean plastic strain tensor.
- Returns
- Mean plastic strain tensor
Referenced by epspij().

◆ epspm()
|
inline |
Get the plastic strain tensor.
- Returns
- Plastic strain tensor
References micromechanical::math::vec2mat().
Referenced by epspij(), and epspva().


◆ epspua()
|
inline |


◆ epspud()
|
inline |
Get the general plastic shear strain from displacements.
- Returns
- General shear strain from displacements
References epspua().

◆ epspuij()
|
inline |


◆ epspukk()
|
inline |
Get the mean plastic strain tensor from displacements.
- Returns
- Mean plastic strain tensor from displacements
Referenced by epspuij().

◆ epspum()
|
inline |
Get the plastic strain tensor from displacements.
- Returns
- Plastic strain tensor from displacements
References micromechanical::math::vec2mat().
Referenced by epspuij(), and epspuva().


◆ epspuv()
|
inline |

◆ epspuva()
|
inline |
Get the plastic volumetric strain from displacements.
- Returns
- Volumetric plastic strain from displacements
References epspum().

◆ epspv()
|
inline |

◆ epspva()
|
inline |
Get the plastic volumetric strain.
- Returns
- Volumetric plastic strain
References epspm().

◆ epsv()
|
inline |
Get the volumetric strain.
- Returns
- Volumetric strain
References eps.
Referenced by micromechanical::ChangHicher< T >::macroMicroIntegrate().

◆ epsva()
|
inline |
Get the volumetric strain approximation.
- Returns
- Volumetric strain approximation
References epsm().
Referenced by micromechanical::ChangHicher< T >::macroMicroIntegrate().


◆ eta()
|
inline |
Get the stress ratio.
- Returns
- Stress ratio
Referenced by micromechanical::core::FabricTensor< T >::evolve().


◆ F11()
|
inline |
◆ F12()
|
inline |
◆ F13()
|
inline |
◆ F22()
|
inline |
◆ F23()
|
inline |
◆ F33()
|
inline |
◆ feta() [1/2]
|
inline |
◆ feta() [2/2]
|
inline |
Get the shear force ratio.
- Parameters
-
idx Index of the integration point
- Returns
- Shear force ratio
Referenced by micromechanical::contacts::ExponentialContactLaw< T >::stiffness(), and micromechanical::contacts::HyperbolicContactLaw< T >::stiffness().
◆ Fij()
|
inline |
Get the fabric tensor as a matrix.
- Returns
- Fabric tensor as a matrix
References micromechanical::math::vec2mat().
Referenced by ar().


◆ fn() [1/2]
|
inline |
◆ fn() [2/2]
|
inline |
Get the normal force.
- Parameters
-
idx Index of the integration point
- Returns
- Normal force
References force.
Referenced by micromechanical::core::ElastoplasticContactLaw< T >::ExplicitCPA(), micromechanical::core::MicromechanicalBase< T > *::fabricEvolution(), and micromechanical::core::NonlinearElasticContactLaw< T >::postIncrement().
◆ FN11()
|
inline |
Get the fabric tensor of contact normal force component FN11.
- Returns
- Fabric tensor component FN11
◆ FN12()
|
inline |
Get the fabric tensor of contact normal force component FN12.
- Returns
- Fabric tensor component FN12
◆ FN13()
|
inline |
Get the fabric tensor of contact normal force component FN13.
- Returns
- Fabric tensor component FN13
◆ FN22()
|
inline |
Get the fabric tensor of contact normal force component FN22.
- Returns
- Fabric tensor component FN22
◆ FN23()
|
inline |
Get the fabric tensor of contact normal force component FN23.
- Returns
- Fabric tensor component FN23
◆ FN33()
|
inline |
Get the fabric tensor of contact normal force component FN33.
- Returns
- Fabric tensor component FN33
◆ fnc() [1/2]
|
inline |
Get the normal force with minimal adhesive force.
- Parameters
-
idx Index of the integration point cohesion Cohesion, value less than contact_min_normal_force will be ignored
- Returns
- Normal force with minimal adhesive force
References fn().
Referenced by micromechanical::contacts::MCCContactLaw< T >::checkConvergence(), micromechanical::core::MCCCSL< T >::CSL(), micromechanical::contacts::MCCContactLaw< T >::dfdforce(), micromechanical::contacts::SANISANDContactLaw< T >::dfdforce(), micromechanical::contacts::SIMSANDContactLaw< T >::dfdforce(), micromechanical::contacts::MCCContactLaw< T >::dgdforce(), micromechanical::contacts::OSIMSANDContactLaw< T >::dgdforce(), micromechanical::contacts::SIMSANDContactLaw< T >::dgdforce(), micromechanical::core::ElastoplasticContactLaw< T >::ExplicitCPA(), feta(), fnc(), micromechanical::contacts::MCCContactLaw< T >::hardening(), micromechanical::contacts::OSIMSANDContactLaw< T >::hardening(), micromechanical::contacts::SANISANDContactLaw< T >::hardening(), micromechanical::core::NonlinearElasticContactLaw< T >::integrate(), micromechanical::contacts::SANISANDContactLaw< T >::maintainYieldSurface(), micromechanical::contacts::ExponentialContactLaw< T >::stiffness(), micromechanical::contacts::HyperbolicContactLaw< T >::stiffness(), and micromechanical::contacts::HypoplasticContactLaw< T >::stiffness().

◆ fnc() [2/2]
|
inline |

◆ FNij()
|
inline |
Get the fabric tensor of contact normal force.
- Returns
- Fabric tensor of contact normal force
References micromechanical::math::vec2mat().
Referenced by an().


◆ fr() [1/2]
|
inline |
◆ fr() [2/2]
|
inline |
Get the shear force.
- Parameters
-
idx Index of the integration point
- Returns
- Shear force
Referenced by micromechanical::contacts::MCCContactLaw< T >::checkConvergence(), micromechanical::contacts::MCCContactLaw< T >::dfdforce(), micromechanical::contacts::SANISANDContactLaw< T >::dfdforce(), micromechanical::contacts::SIMSANDContactLaw< T >::dfdforce(), micromechanical::contacts::MCCContactLaw< T >::dgdforce(), micromechanical::contacts::OSIMSANDContactLaw< T >::dgdforce(), micromechanical::contacts::SIMSANDContactLaw< T >::dgdforce(), micromechanical::core::ElastoplasticContactLaw< T >::ExplicitCPA(), micromechanical::core::MicromechanicalBase< T > *::fabricEvolution(), micromechanical::contacts::MCCContactLaw< T >::hardening(), micromechanical::contacts::SANISANDContactLaw< T >::maintainYieldSurface(), nst(), and micromechanical::core::NonlinearElasticContactLaw< T >::postIncrement().
◆ fs() [1/2]
|
inline |
◆ fs() [2/2]
|
inline |
Get the shear force at the first direction.
- Parameters
-
idx Index of the integration point
- Returns
- Shear force at the first direction
References force.
Referenced by micromechanical::contacts::HypoplasticContactLaw< T >::stiffness().

◆ fst() [1/2]
|
inline |
◆ fst() [2/2]
|
inline |
Get the shear force at both directions.
- Parameters
-
idx Index of the integration point
- Returns
- Shear force at both directions
Referenced by nst().
◆ ft() [1/2]
|
inline |
◆ ft() [2/2]
|
inline |
Get the shear force at the second direction.
- Parameters
-
idx Index of the integration point
- Returns
- Shear force at the second direction
References force.
Referenced by micromechanical::contacts::HypoplasticContactLaw< T >::stiffness().

◆ FT11()
|
inline |
Get the fabric tensor of contact shear force component FT11.
- Returns
- Fabric tensor component FT11
◆ FT12()
|
inline |
Get the fabric tensor of contact shear force component FT12.
- Returns
- Fabric tensor component FT12
◆ FT13()
|
inline |
Get the fabric tensor of contact normal force component FT13.
- Returns
- Fabric tensor component FT13
◆ FT22()
|
inline |
Get the fabric tensor of contact shear force component FT22.
- Returns
- Fabric tensor component FT22
◆ FT23()
|
inline |
Get the fabric tensor of contact shear force component FT23.
- Returns
- Fabric tensor component FT23
◆ FT33()
|
inline |
Get the fabric tensor of contact shear force component FT33.
- Returns
- Fabric tensor component FT33
◆ FTij()
|
inline |
Get the fabric tensor of contact shear force.
- Returns
- Fabric tensor of contact shear force
References micromechanical::math::vec2mat().
Referenced by at().


◆ hash()
|
inline |
Hash the state variables at the integration point with index idx.
- Parameters
-
dfi Contact force increment idx Index of the integration point precision Precision of the hash value, by default 15 symmetric Whether to revert the symmetric contact state variables, by default False cscalars Custom scalar fields to be multiplied by -1 cvectors Custom vector fields to be multiplied by -1
References cscalars.
Referenced by micromechanical::core::MicromechanicalBase< T > *::contactIntegrates().

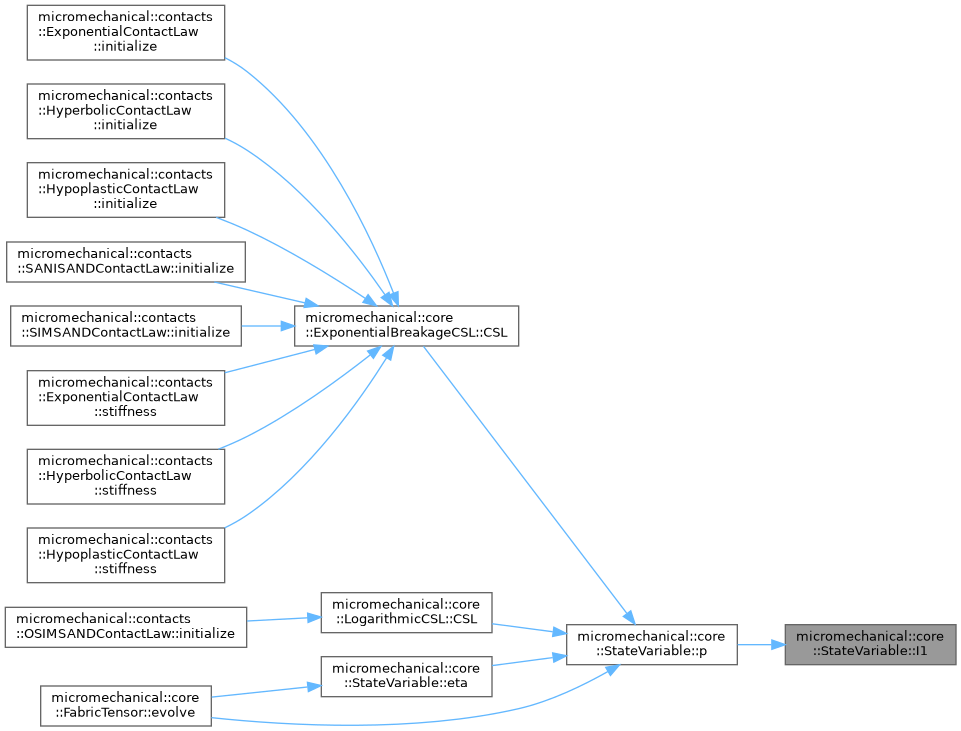
◆ I1()
|
inline |
Get the first invariant of the stress tensor.
- Returns
- First invariant of the stress tensor
Referenced by p().
◆ I2()
|
inline |
Get the second invariant of the stress tensor.
- Returns
- Second invariant of the stress tensor
References sigm().

◆ I3()
|
inline |
Get the third invariant of the stress tensor.
- Returns
- Third invariant of the stress tensor
References sigm().

◆ J2()
|
inline |


◆ J3()
|
inline |
Get the third invariant of the deviatoric stress tensor.
- Returns
- Third invariant of the deviatoric stress tensor
References tauij().

◆ lode()
|
inline |

◆ lodea()
|
inline |

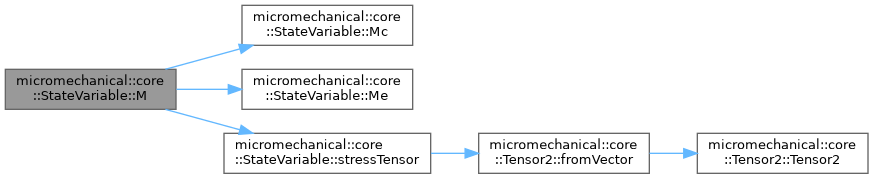
◆ M()
|
inline |
Get the slope of the critical state line.
- Returns
- Slope of the critical state line
References Mc(), Me(), and stressTensor().
◆ Mc()
|
inline |

◆ Me()
|
inline |

◆ ns()
|
inline |
References nst().
Referenced by micromechanical::core::MicromechanicalBase< T > *::fabricEvolution().
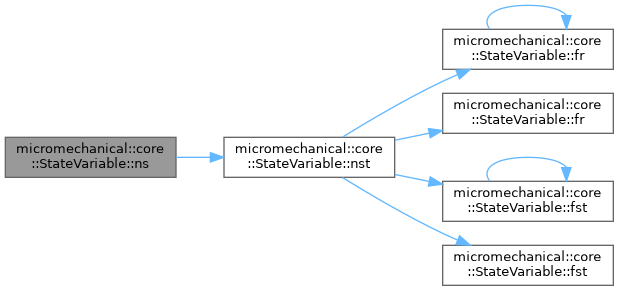

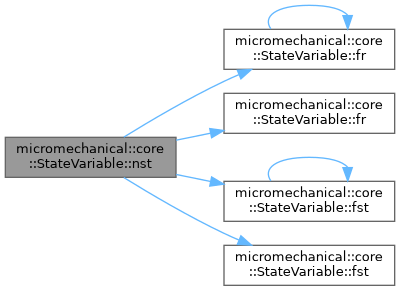
◆ nst()
|
inline |
Get the shear force direction.
- Parameters
-
idx Index of the integration point
- Returns
- Shear force direction
References fr(), fr(), fst(), and fst().
Referenced by micromechanical::contacts::MCCContactLaw< T >::dfdforce(), micromechanical::contacts::OSIMSANDContactLaw< T >::dfdforce(), micromechanical::contacts::SANISANDContactLaw< T >::dfdforce(), micromechanical::contacts::SIMSANDContactLaw< T >::dfdforce(), micromechanical::contacts::MCCContactLaw< T >::dgdforce(), micromechanical::contacts::OSIMSANDContactLaw< T >::dgdforce(), micromechanical::contacts::SANISANDContactLaw< T >::dgdforce(), micromechanical::contacts::SIMSANDContactLaw< T >::dgdforce(), micromechanical::contacts::OSIMSANDContactLaw< T >::hardening(), micromechanical::contacts::SIMSANDContactLaw< T >::hardening(), ns(), and nt().
◆ nStateVariables()
|
inlinestatic |
Get the number of state variables.
- Parameters
-
size Number of integration points dispp Whether to include plastic displacement in the state variables nstatev_custom Number of custom state variables
Referenced by micromechanical::core::MicromechanicalBase< T > *::nstatev().

◆ nt()
|
inline |
References nst().
Referenced by micromechanical::core::MicromechanicalBase< T > *::fabricEvolution().

◆ operator=() [1/2]
|
inline |

◆ operator=() [2/2]
|
inlinenoexcept |
Move assignment operator.
- Parameters
-
sv State variable
References StateVariable().

◆ p()
|
inline |
Get the mean stress.
- Returns
- Mean stress
References I1().
Referenced by micromechanical::core::ExponentialBreakageCSL< T >::CSL(), micromechanical::core::LogarithmicCSL< T >::CSL(), eta(), and micromechanical::core::FabricTensor< T >::evolve().

◆ peeq()
|
inline |
Get the equivalent plastic strain.
- Returns
- Equivalent plastic strain
References epspij().
Referenced by copyToRawPointer().


◆ plasticDisplacementStrainTensor()
|
inline |
Get the plastic strain tensor from displacements.
- Returns
- strain plastic tensor from displacements
References micromechanical::core::Tensor2< T >::fromVector().

◆ plasticStrainTensor()
|
inline |
Get the plastic strain tensor.
- Returns
- strain plastic tensor
References micromechanical::core::Tensor2< T >::fromVector().

◆ pueeq()
|
inline |
Get the equivalent plastic strain from displacements.
- Returns
- Equivalent plastic strain from displacements
References epspuij().

◆ q()
|
inline |


◆ Ra()
|
inline |
Major stress ratio siga1/siga3.
References e, siga11(), and siga33().
Referenced by micromechanical::core::ContactLawBase< T > *::frictionCoefficient().


◆ revertSymmetricContactStateVariables()
|
inline |
Revert contact force, displacement and specified custom variables by multiplying them with -1.
- Parameters
-
idx Index of the integration point cscalars Custom scalar fields to be multiplied by -1 cvectors Custom vector fields to be multiplied by -1
References cscalars.
◆ sig11()
|
inline |


◆ sig123()
|
inline |

◆ sig22()
|
inline |


◆ sig33()
|
inline |


◆ siga11()
|
inline |

◆ siga123()
|
inline |
Principal stresses with anisotropy.
References anisotropicStressTensor().
Referenced by siga11(), siga22(), and siga33().

◆ siga22()
|
inline |

◆ siga33()
|
inline |

◆ sigkk()
|
inline |
Get the mean stress tensor.
- Returns
- Mean stress tensor
Referenced by tauij().

◆ sigm()
|
inline |
Get the stress tensor.
- Returns
- Stress tensor
References micromechanical::math::vec2mat().
Referenced by anisotropicStressTensor(), ar(), I2(), I3(), sig123(), and tauij().

◆ stateVariableNames()
|
inlinestatic |
Get the names of the state variables.
References dispp, size, and StateVariable().

◆ strainTensor()
|
inline |
Get the strain tensor.
- Returns
- strain tensor
References micromechanical::core::Tensor2< T >::fromVector().

◆ stressTensor()
|
inline |
Get the stress tensor.
- Returns
- Stress tensor
References micromechanical::core::Tensor2< T >::fromVector().
Referenced by micromechanical::core::FabricTensor< T >::evolve(), and M().

◆ tauij()
|
inline |
Get the deviatoric stress tensor.
- Returns
- Deviatoric stress tensor
References sigkk(), and sigm().
Referenced by micromechanical::core::FabricTensor< T >::evolve(), J2(), and J3().


◆ un() [1/2]
|
inline |
◆ un() [2/2]
|
inline |
Get the normal displacement.
- Parameters
-
idx Index of the integration point
- Returns
- Normal displacement
References disp.
◆ upn() [1/2]
|
inline |
◆ upn() [2/2]
|
inline |
Get the plastic normal displacement.
- Parameters
-
idx Index of the integration point
- Returns
- plastic normal displacement
References dispp.
◆ upr() [1/2]
|
inline |
◆ upr() [2/2]
|
inline |
Get the plastic shear displacement.
- Parameters
-
idx Index of the integration point
- Returns
- plastic shear displacement
Referenced by micromechanical::contacts::OSIMSANDContactLaw< T >::hardening(), and micromechanical::contacts::SIMSANDContactLaw< T >::hardening().
◆ ups() [1/2]
|
inline |
◆ ups() [2/2]
|
inline |
Get the plastic shear displacement at the first direction.
- Parameters
-
idx Index of the integration point
- Returns
- plastic shear displacement at the first direction
References dispp.
◆ upst() [1/2]
|
inline |
◆ upst() [2/2]
|
inline |
Get the plastic shear displacement at both directions.
- Parameters
-
idx Index of the integration point
- Returns
- Shear displacement at both directions
◆ upt() [1/2]
|
inline |
◆ upt() [2/2]
|
inline |
Get the plastic shear displacement at the second direction.
- Parameters
-
idx Index of the integration point
- Returns
- Plastic shear displacement at the second direction
References dispp.
◆ ur() [1/2]
|
inline |
◆ ur() [2/2]
|
inline |
Get the shear displacement.
- Parameters
-
idx Index of the integration point
- Returns
- Shear displacement
Referenced by micromechanical::contacts::ExponentialContactLaw< T >::stiffness(), micromechanical::contacts::HyperbolicContactLaw< T >::stiffness(), micromechanical::contacts::OSIMSANDContactLaw< T >::yieldSurface(), and micromechanical::contacts::SIMSANDContactLaw< T >::yieldSurface().
◆ us() [1/2]
|
inline |
◆ us() [2/2]
|
inline |
Get the shear displacement at the first direction.
- Parameters
-
idx Index of the integration point
- Returns
- Shear displacement at the first direction
References disp.
◆ ust() [1/2]
|
inline |
◆ ust() [2/2]
|
inline |
Get the shear displacement at both directions.
- Parameters
-
idx Index of the integration point
- Returns
- Shear displacement at both directions
◆ ut() [1/2]
|
inline |
◆ ut() [2/2]
|
inline |
Get the shear displacement at the second direction.
- Parameters
-
idx Index of the integration point
- Returns
- Shear displacement at the second direction
References disp.
Member Data Documentation
◆ A
| Eigen::Matrix<T, 6, 1> micromechanical::core::StateVariable< T >::A = Eigen::Matrix<T, 6, 1>::Zero() |
fabric vector F
Referenced by A11(), A12(), A13(), A22(), A23(), A33(), anisotropicStressTensor(), micromechanical::core::MicromechanicalBase< T > *::fabricEvolution(), operator=(), and StateVariable().
◆ cached_num
| int micromechanical::core::StateVariable< T >::cached_num = 0 |
cached number of the integration pointsd
Referenced by micromechanical::core::MicromechanicalBase< T > *::contactIntegrates(), operator=(), and StateVariable().
◆ contact_min_normal_force
| T micromechanical::core::StateVariable< T >::contact_min_normal_force = 1e-10 |
minimum normal force
Referenced by micromechanical::core::NonlinearElasticContactLaw< T >::integrate(), operator=(), StateVariable(), and micromechanical::contacts::CoulombContactLaw< T >::stiffness().
◆ cscalars
| std::map<std::string, Eigen::Matrix<T, Eigen::Dynamic, 1> > micromechanical::core::StateVariable< T >::cscalars = {} |
custom contact scalars
Referenced by micromechanical::contacts::MCCContactLaw< T >::checkConvergence(), copyContactStateVariables(), copyFromRawPointer(), copyToRawPointer(), micromechanical::core::MCCCSL< T >::CSL(), micromechanical::contacts::MCCContactLaw< T >::dfdforce(), micromechanical::contacts::SANISANDContactLaw< T >::dfdforce(), micromechanical::contacts::MCCContactLaw< T >::dgdforce(), micromechanical::contacts::SANISANDContactLaw< T >::dgdforce(), micromechanical::core::ElastoplasticContactLaw< T >::ExplicitCPA(), micromechanical::contacts::MCCContactLaw< T >::hardening(), micromechanical::contacts::SANISANDContactLaw< T >::hardening(), hash(), micromechanical::contacts::MCCContactLaw< T >::initialize(), micromechanical::contacts::SANISANDContactLaw< T >::initialize(), micromechanical::ChangHicher< T >::macroMicroIntegrate(), micromechanical::contacts::SANISANDContactLaw< T >::maintainYieldSurface(), operator=(), micromechanical::core::MicromechanicalBase< T > *::resetCustomStateVariables(), revertSymmetricContactStateVariables(), StateVariable(), micromechanical::contacts::MCCContactLaw< T >::updateHardeningVariables(), micromechanical::contacts::SANISANDContactLaw< T >::updateHardeningVariables(), micromechanical::contacts::MCCContactLaw< T >::yieldSurface(), and micromechanical::contacts::SANISANDContactLaw< T >::yieldSurface().
◆ cvectors
| std::map<std::string, Eigen::Matrix<T, Eigen::Dynamic, Eigen::Dynamic> > micromechanical::core::StateVariable< T >::cvectors = {} |
custom contact vectors
Referenced by copyFromRawPointer(), copyToRawPointer(), micromechanical::ChangHicher< T >::macroMicroIntegrate(), operator=(), micromechanical::core::MicromechanicalBase< T > *::resetCustomStateVariables(), and StateVariable().
◆ disp
| Eigen::Matrix<T, Eigen::Dynamic, 3> micromechanical::core::StateVariable< T >::disp |
displacement
Referenced by micromechanical::ChangHicher< T >::adaptiveIntegrationSubstepping(), micromechanical::core::MicromechanicalBase< T > *::contactIntegrates(), copyFromRawPointer(), copyToRawPointer(), micromechanical::core::ElastoplasticContactLaw< T >::ExplicitCPA(), micromechanical::core::ContactLawBase< T > *::increment(), micromechanical::ChangHicher< T >::macroMicroIntegrate(), operator=(), StateVariable(), un(), us(), and ut().
◆ dispp
| Eigen::Matrix<T, Eigen::Dynamic, 3> micromechanical::core::StateVariable< T >::dispp |
plastic displacement
Referenced by copyFromRawPointer(), copyToRawPointer(), micromechanical::core::ElastoplasticContactLaw< T >::ExplicitCPA(), micromechanical::ChangHicher< T >::macroMicroIntegrate(), nStateVariables(), operator=(), StateVariable(), stateVariableNames(), upn(), ups(), and upt().
◆ e
| T micromechanical::core::StateVariable< T >::e = 0.0 |
void ratio
Referenced by b(), ba(), micromechanical::core::RichartStiffness< T >::elasticStiffness(), micromechanical::core::FabricTensor< T >::evolve(), micromechanical::contacts::MCCContactLaw< T >::hardening(), micromechanical::contacts::SANISANDContactLaw< T >::hardening(), micromechanical::ChangHicher< T >::macroMicroIntegrate(), operator=(), Ra(), StateVariable(), micromechanical::contacts::HypoplasticContactLaw< T >::stiffness(), micromechanical::core::CSLBase< T >::tanphip(), micromechanical::core::CSLBase< T >::tanphipt(), and micromechanical::contacts::SANISANDContactLaw< T >::yieldSurface().
◆ ec
| T micromechanical::core::StateVariable< T >::ec = 0.0 |
critical void ratio
Referenced by micromechanical::core::ExponentialBreakageCSL< T >::CSL(), micromechanical::core::LogarithmicCSL< T >::CSL(), micromechanical::core::FabricTensor< T >::evolve(), operator=(), StateVariable(), micromechanical::core::ElastoplasticContactLaw< T >::stiffness(), micromechanical::core::CSLBase< T >::tanphip(), micromechanical::core::CSLBase< T >::tanphipt(), and micromechanical::contacts::SANISANDContactLaw< T >::yieldSurface().
◆ eps
| Eigen::Matrix<T, 6, 1> micromechanical::core::StateVariable< T >::eps = Eigen::Matrix<T, 6, 1>::Zero() |
strain vector
Referenced by micromechanical::core::MixedLoadControl< T >::checkConvergence(), copyFromRawPointer(), copyToRawPointer(), epsv(), micromechanical::core::MixedLoadControl< T >::increment(), micromechanical::core::LoadPhase< T >::initialize(), micromechanical::ChangHicher< T >::macroMicroIntegrate(), operator=(), and StateVariable().
◆ epsp
| Eigen::Matrix<T, 6, 1> micromechanical::core::StateVariable< T >::epsp = Eigen::Matrix<T, 6, 1>::Zero() |
plastic strain vector
Referenced by copyFromRawPointer(), copyToRawPointer(), epspv(), micromechanical::ChangHicher< T >::macroMicroIntegrate(), operator=(), and StateVariable().
◆ epspu
| Eigen::Matrix<T, 6, 1> micromechanical::core::StateVariable< T >::epspu = Eigen::Matrix<T, 6, 1>::Zero() |
plastic strain vector from displacements
Referenced by epspuv(), micromechanical::ChangHicher< T >::macroMicroIntegrate(), operator=(), and StateVariable().
◆ F
| Eigen::Matrix<T, 6, 1> micromechanical::core::StateVariable< T >::F = Eigen::Matrix<T, 6, 1>::Zero() |
fabric vector F
Referenced by copyFromRawPointer(), copyToRawPointer(), F11(), F12(), F13(), F22(), F23(), F33(), micromechanical::core::MicromechanicalBase< T > *::fabricEvolution(), operator=(), and StateVariable().
◆ force
| Eigen::Matrix<T, Eigen::Dynamic, 3> micromechanical::core::StateVariable< T >::force |
force
Referenced by micromechanical::ChangHicher< T >::adaptiveIntegrationSubstepping(), micromechanical::ChangHicher< T >::contactIntegrate(), micromechanical::core::MicromechanicalBase< T > *::contactIntegrates(), copyFromRawPointer(), copyToRawPointer(), micromechanical::core::ElastoplasticContactLaw< T >::ExplicitCPA(), fn(), fs(), ft(), micromechanical::contacts::MCCContactLaw< T >::hardening(), micromechanical::core::ContactLawBase< T > *::increment(), micromechanical::ChangHicher< T >::macroMicroIntegrate(), micromechanical::contacts::SANISANDContactLaw< T >::maintainYieldSurface(), operator=(), StateVariable(), micromechanical::ChangHicher< T >::stiffness(), micromechanical::contacts::CoulombContactLaw< T >::stiffness(), micromechanical::contacts::ElasticContactLaw< T >::stiffness(), micromechanical::contacts::ExponentialContactLaw< T >::stiffness(), micromechanical::contacts::HyperbolicContactLaw< T >::stiffness(), micromechanical::contacts::HypoplasticContactLaw< T >::stiffness(), and micromechanical::core::ElastoplasticContactLaw< T >::stiffness().
◆ phase
| int micromechanical::core::StateVariable< T >::phase = 0 |
load phase index
Referenced by operator=(), and StateVariable().
◆ phi
| T micromechanical::core::StateVariable< T >::phi = 0.0 |
critical friction angle
Referenced by operator=(), and StateVariable().
◆ scalars
| std::map<std::string, T> micromechanical::core::StateVariable< T >::scalars = {} |
custom scalars
Referenced by micromechanical::ChangHicher< T >::contactIntegrate(), micromechanical::contacts::OSIMSANDContactLaw< T >::dfdforce(), micromechanical::contacts::SANISANDContactLaw< T >::dfdforce(), micromechanical::contacts::SANISANDContactLaw< T >::dgdforce(), micromechanical::core::FabricTensor< T >::evolve(), micromechanical::contacts::OSIMSANDContactLaw< T >::hardening(), micromechanical::contacts::SANISANDContactLaw< T >::hardening(), micromechanical::contacts::SANISANDContactLaw< T >::maintainYieldSurface(), operator=(), micromechanical::core::MicromechanicalBase< T > *::resetCustomStateVariables(), StateVariable(), micromechanical::contacts::ExponentialContactLaw< T >::stiffness(), micromechanical::contacts::HyperbolicContactLaw< T >::stiffness(), micromechanical::contacts::HypoplasticContactLaw< T >::stiffness(), micromechanical::contacts::SANISANDContactLaw< T >::updateHardeningVariables(), micromechanical::contacts::OSIMSANDContactLaw< T >::yieldSurface(), and micromechanical::contacts::SANISANDContactLaw< T >::yieldSurface().
◆ sig
| Eigen::Matrix<T, 6, 1> micromechanical::core::StateVariable< T >::sig = Eigen::Matrix<T, 6, 1>::Zero() |
stress vector
Referenced by micromechanical::core::MixedLoadControl< T >::checkConvergence(), copyFromRawPointer(), copyToRawPointer(), micromechanical::core::MixedLoadControl< T >::increment(), micromechanical::core::LoadPhase< T >::initialize(), micromechanical::ChangHicher< T >::macroMicroIntegrate(), operator=(), StateVariable(), and micromechanical::core::MicromechanicalBase< T > *::umat().
◆ size
| int micromechanical::core::StateVariable< T >::size = 37 |
number of the integration points
Referenced by micromechanical::contacts::MCCContactLaw< T >::initialize(), micromechanical::contacts::SANISANDContactLaw< T >::initialize(), nStateVariables(), operator=(), StateVariable(), StateVariable(), and stateVariableNames().
◆ vectors
| std::map<std::string, Eigen::Matrix<T, Eigen::Dynamic, 1> > micromechanical::core::StateVariable< T >::vectors = {} |
custom vectors
Referenced by micromechanical::core::ElastoplasticContactLaw< T >::ExplicitCPA(), micromechanical::core::MicromechanicalBase< T > *::fabricEvolution(), micromechanical::contacts::MCCContactLaw< T >::hardening(), micromechanical::contacts::OSIMSANDContactLaw< T >::hardening(), micromechanical::contacts::SIMSANDContactLaw< T >::hardening(), operator=(), micromechanical::contacts::HypoplasticContactLaw< T >::preIntegration(), micromechanical::core::MicromechanicalBase< T > *::resetCustomStateVariables(), StateVariable(), micromechanical::contacts::HypoplasticContactLaw< T >::stiffness(), micromechanical::core::ElastoplasticContactLaw< T >::stiffness(), and micromechanical::contacts::MCCContactLaw< T >::updateHardeningVariables().
◆ w
| Eigen::Matrix<T, Eigen::Dynamic, 1> micromechanical::core::StateVariable< T >::w |
plastic work
Referenced by copyFromRawPointer(), copyToRawPointer(), micromechanical::core::ExponentialBreakageCSL< T >::CSL(), micromechanical::core::ElastoplasticContactLaw< T >::ExplicitCPA(), micromechanical::contacts::MCCContactLaw< T >::hardening(), micromechanical::ChangHicher< T >::macroMicroIntegrate(), operator=(), micromechanical::core::NonlinearElasticContactLaw< T >::postIncrement(), StateVariable(), and micromechanical::contacts::MCCContactLaw< T >::updateHardeningVariables().
The documentation for this struct was generated from the following file:
- include/micromechanical/core/statevariable.hpp