Base class for micromechanical models. More...
#include <micromechanical.hpp>
Public Member Functions | |
| MicromechanicalBase (ContactLawBase< T > *contact, const std::map< std::string, T > &props={}, T npv=1e9, T radius=0.65e-3) | |
| constructor | |
| MicromechanicalBase (ContactLawType type, const std::map< std::string, T > &props={}, T npv=1e9, T radius=0.65e-3) | |
| constructor | |
| MicromechanicalBase (const std::string &path, const std::map< std::string, T > &props={}, T npv=1e9, T radius=0.65e-3) | |
| constructor | |
| MicromechanicalBase ()=default | |
| default constructor | |
| virtual | ~MicromechanicalBase ()=default |
| destructor | |
| void | setContactLaw (ContactLawType type, const std::map< std::string, T > &props={}) |
| Set the contact law if it is not set in the constructor. | |
| void | setContactLaw (const std::string &path, const std::map< std::string, T > &props={}) |
| Set the contact law if it is not set in the constructor. | |
| void | setContactLaw (ContactLawBase< T > *contact) |
| Set the contact law if it is not set in the constructor. | |
| std::vector< StateVariable< T > > | run () |
| Run the micromechanical model. | |
| void | umat (const T *dstran, T *stress, T *statev, T *ddsdde=nullptr, const bool initialize=false, const bool normalize_ddsdde=true) |
| ABAQUS UMAT interface. | |
| void | vumat (const int nBlock, const T *strainInc, const T *stressOld, T *stressNew, const T *stateOld, T *stateNew, const bool initialize=false) |
| ABAQUS VUMAT interface. | |
Public Attributes | |
| std::shared_ptr< ContactLawBase< T > > | contact |
| contact law | |
| std::shared_ptr< Integration< T > > | integration |
| gauss integration points | |
| std::shared_ptr< Load< T > > | load |
| load | |
| std::shared_ptr< DebugVariable< T > > | debugVariable = std::shared_ptr<DebugVariable<T>>(nullptr) |
| debug variable | |
| std::string | name = "Undefined" |
| name of the model | |
| std::vector< StateVariable< T > > | stateVars = {} |
| state variables of the current run | |
| std::shared_ptr< Options< T > > | options = std::shared_ptr<Options<T>>(nullptr) |
| options for the micromechanical model | |
| int | _phase = 0 |
| index of the phase | |
| int | _step = 0 |
| current step | |
| int | _mixedLoad = 0 |
| number of mixed load steps | |
| int | _integration = 0 |
| number of integration steps | |
Protected Member Functions | |
| int | nstatev () const |
| StateVariable< T > | initialize () |
| Initialize the state variables. | |
| virtual void | postInitialize (StateVariable< T > &sv) |
| Post-initialize the state variables. | |
| void | postProcess (StateVariable< T > &sv) |
| Post-process the state variables. | |
| void | resetCustomStateVariables (StateVariable< T > &sv0, StateVariable< T > &sv) |
| Reset the custom state variables to zeros existing in the current state variables but not in the initial state variables. | |
| virtual Eigen::Matrix< T, 6, 1 > | increment (const Eigen::Matrix< T, 6, 1 > &dx, Eigen::Matrix< T, 6, 1 > x, const Eigen::Matrix< T, 6, 6 > &S, const Eigen::Matrix< T, 6, 6 > &E, const Eigen::Matrix< T, 6, 6 > &G, const StateVariable< T > &sv0, StateVariable< T > &sv)=0 |
| Compute one increment. | |
| void | fabricEvolution (const StateVariable< T > &sv0, StateVariable< T > &sv) |
| Compute the fabric evolution. | |
| virtual Eigen::Matrix< T, Eigen::Dynamic, Eigen::Dynamic > | stiffness (const StateVariable< T > &sv0, const StateVariable< T > &sv, const Eigen::Matrix< T, Eigen::Dynamic, 1 > kn=Eigen::Matrix< T, Eigen::Dynamic, 1 >::Zero(0, 1), const Eigen::Matrix< T, Eigen::Dynamic, 1 > ks=Eigen::Matrix< T, Eigen::Dynamic, 1 >::Zero(0, 1), bool original=false)=0 |
| Compute the stiffness matrix. | |
| virtual void | macroMicroIntegrate (const Eigen::Matrix< T, 6, 6 > &K, const Eigen::Matrix< T, 6, 1 > &dsig, const Eigen::Matrix< T, 6, 1 > &deps, const StateVariable< T > &sv0, StateVariable< T > &sv)=0 |
| Integrate the macro-micro relation. | |
| void | contactIntegrates (const Eigen::Matrix< T, Eigen::Dynamic, 3 > &dforce, const Eigen::Matrix< T, Eigen::Dynamic, 3 > &ddisp, const StateVariable< T > &sv0, StateVariable< T > &sv) |
| Integrate all the contact laws with cache. | |
| virtual void | contactIntegrate (int idx, const Eigen::Matrix< T, 3, 1 > &dforce, const Eigen::Matrix< T, 3, 1 > &ddisp, const StateVariable< T > &sv0, StateVariable< T > &sv) const =0 |
| Integrate the contact law. | |
| virtual Eigen::Matrix< T, Eigen::Dynamic, 3 > | localizeStress (const Eigen::Matrix< T, 6, 1 > &sig, const StateVariable< T > &sv0, StateVariable< T > &sv) |
| localize the marcro stress to micro contact force | |
| virtual Eigen::Matrix< T, Eigen::Dynamic, 3 > | localizeStrain (const Eigen::Matrix< T, 6, 1 > &eps, const StateVariable< T > &sv0, StateVariable< T > &sv) |
| localize the marcro strain to micro contact displacement | |
| virtual Eigen::Matrix< T, 6, 1 > | averageStress (const Eigen::Matrix< T, Eigen::Dynamic, 3 > force, const StateVariable< T > &sv0, StateVariable< T > &sv) |
| Average the micro contact force to macro stress. | |
| virtual Eigen::Matrix< T, 6, 1 > | averageStrain (const Eigen::Matrix< T, Eigen::Dynamic, 3 > disp, const StateVariable< T > &sv0, StateVariable< T > &sv) |
| Average the micro contact displacement to macro strain. | |
Detailed Description
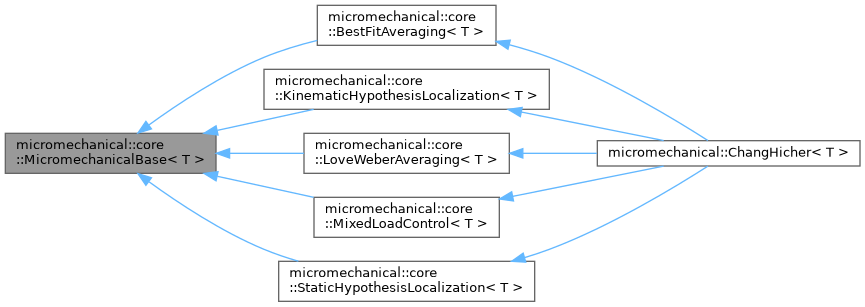
struct micromechanical::core::MicromechanicalBase< T >
Base class for micromechanical models.
Constructor & Destructor Documentation
◆ MicromechanicalBase() [1/4]
|
inlineexplicit |
constructor
- Parameters
-
contact contact law props material properties npv number of integration points radius radius of the particle
◆ MicromechanicalBase() [2/4]
|
inlineexplicit |
constructor
- Parameters
-
type contact law type props material properties npv number of integration points radius radius of the particle
◆ MicromechanicalBase() [3/4]
|
inlineexplicit |
constructor
- Parameters
-
path path to the contact law plugin props material properties npv number of integration points radius radius of the particle
◆ MicromechanicalBase() [4/4]
|
default |
default constructor
◆ ~MicromechanicalBase()
|
virtualdefault |
destructor
Member Function Documentation
◆ averageStrain()
|
inlineprotectedvirtual |
Average the micro contact displacement to macro strain.
- Parameters
-
disp micro contact displacement sv0 initial state variable sv state variable
- Returns
- macro strain
Reimplemented in micromechanical::core::BestFitAveraging< T >.
◆ averageStress()
|
inlineprotectedvirtual |
Average the micro contact force to macro stress.
- Parameters
-
force micro contact force sv0 initial state variable sv state variable
- Returns
- macro stress
Reimplemented in micromechanical::core::LoveWeberAveraging< T >.
◆ contactIntegrate()
|
protectedpure virtual |
Integrate the contact law.
- Parameters
-
idx index of the integration point dforce force increment ddisp displacement increment sv0 initial state variable sv state variable
Implemented in micromechanical::ChangHicher< T >.
◆ contactIntegrates()
|
inlineprotected |
Integrate all the contact laws with cache.
- Parameters
-
dforce force increment ddisp displacement increment sv0 initial state variable sv state variable
Referenced by micromechanical::ChangHicher< T >::macroMicroIntegrate().

◆ fabricEvolution()
|
inlineprotected |
Compute the fabric evolution.
- Parameters
-
sv0 state variables at the beginning of the increment sv state variables at the end of the increment
Referenced by micromechanical::core::MixedLoadControl< T >::increment().

◆ increment()
|
protectedpure virtual |
Compute one increment.
- Parameters
-
dx mixed stress/strain increment, pure strain in finite element analysis x mixed stress/strain S stress control matrix E strain control matrix G ignored control matrix sv0 state variables at the beginning of the increment sv state variables at the end of the increment
- Returns
- stress
Implemented in micromechanical::core::MixedLoadControl< T >.
◆ initialize()
|
inlineprotected |
Initialize the state variables.
- Returns
- a StateVariable object with initialized state variables
◆ localizeStrain()
|
inlineprotectedvirtual |
localize the marcro strain to micro contact displacement
- Parameters
-
eps macro strain sv0 initial state variable sv state variable
- Returns
- micro contact displacement
Reimplemented in micromechanical::core::KinematicHypothesisLocalization< T >.
◆ localizeStress()
|
inlineprotectedvirtual |
localize the marcro stress to micro contact force
- Parameters
-
sig macro stress sv0 initial state variable sv state variable
- Returns
- micro contact force
Reimplemented in micromechanical::core::StaticHypothesisLocalization< T >.
◆ macroMicroIntegrate()
|
protectedpure virtual |
Integrate the macro-micro relation.
- Parameters
-
K stiffness matrix dsig stress increment deps strain increment sv0 initial state variable sv state variable
Implemented in micromechanical::ChangHicher< T >.
Referenced by micromechanical::core::MixedLoadControl< T >::increment().

◆ nstatev()
|
inlineprotected |
◆ postInitialize()
|
inlineprotectedvirtual |
Post-initialize the state variables.
- Parameters
-
sv state variables
◆ postProcess()
|
inlineprotected |
Post-process the state variables.
- Parameters
-
sv state variables
◆ resetCustomStateVariables()
|
inlineprotected |
Reset the custom state variables to zeros existing in the current state variables but not in the initial state variables.
- Parameters
-
sv0 initial state variables sv current state variables
◆ run()
|
inline |
Run the micromechanical model.
- Returns
- a list of state variables
◆ setContactLaw() [1/3]
|
inline |
Set the contact law if it is not set in the constructor.
- Parameters
-
path path to the contact law plugin props material properties
◆ setContactLaw() [2/3]
|
inline |
Set the contact law if it is not set in the constructor.
- Parameters
-
contact contact law
◆ setContactLaw() [3/3]
|
inline |
Set the contact law if it is not set in the constructor.
- Parameters
-
type contact law type props material properties
◆ stiffness()
|
protectedpure virtual |
Compute the stiffness matrix.
- Parameters
-
sv0 initial state variable sv state variable kn contact normal stiffness ks contact shear stiffness original return the original 9x9 stiffness matrix
- Returns
- stiffness matrix
Implemented in micromechanical::ChangHicher< T >.
Referenced by micromechanical::core::MixedLoadControl< T >::linearize().

◆ umat()
|
inline |
ABAQUS UMAT interface.
- Parameters
-
dstran strain increment stress stress statev state variables ddsdde stiffness matrix initialize whether to initialize the static variables normalize_ddsdde whether to normalize the stiffness matrix, since the strain increment from ABAQUS is engineering strain which is twice of the tensorial shear strain
- Note
- The shear strain component in UMAT is engineering strain which is twice of the tensorial shear strain
-
The Jacobian matrix
ddsddecan be nullptr for compatible with ABAQUS VUMAT interface - The engineering shear strain is twice of the tensorial shear strain in UMAT, thus the stiffness matrix should be converted to the stiffness matrix corresponding to engineering shear strain.
◆ vumat()
|
inline |
ABAQUS VUMAT interface.
- Parameters
-
nBlock number of blocks strainInc strain increment, read only stressOld old stress, read only stressNew new stress stateOld old state variables, read only stateNew new state variables initialize whether to initialize the static variables
- Note
- Since the component order in Abaqus Explicit is different from Abaqus Standard, the shear stress components 5/6 should be swapped, see Convention Used for Stress and Strain Components.
- The shear strain in UMAT is engineering strain which is twice of the tensorial shear strain in VUMAT, thus the tensorial shear strain should be converted to engineering shear strain when passing to the umat method, see Component Ordering in Tensors.
Member Data Documentation
◆ _integration
| int micromechanical::core::MicromechanicalBase< T >::_integration = 0 |
number of integration steps
Referenced by micromechanical::ChangHicher< T >::macroMicroIntegrate().
◆ _mixedLoad
| int micromechanical::core::MicromechanicalBase< T >::_mixedLoad = 0 |
number of mixed load steps
Referenced by micromechanical::core::MixedLoadControl< T >::increment(), and micromechanical::ChangHicher< T >::macroMicroIntegrate().
◆ _phase
| int micromechanical::core::MicromechanicalBase< T >::_phase = 0 |
index of the phase
Referenced by micromechanical::core::MixedLoadControl< T >::increment(), and micromechanical::ChangHicher< T >::macroMicroIntegrate().
◆ _step
| int micromechanical::core::MicromechanicalBase< T >::_step = 0 |
current step
Referenced by micromechanical::core::MixedLoadControl< T >::increment(), and micromechanical::ChangHicher< T >::macroMicroIntegrate().
◆ contact
| std::shared_ptr<ContactLawBase<T> > micromechanical::core::MicromechanicalBase< T >::contact |
◆ debugVariable
| std::shared_ptr<DebugVariable<T> > micromechanical::core::MicromechanicalBase< T >::debugVariable = std::shared_ptr<DebugVariable<T>>(nullptr) |
debug variable
Referenced by micromechanical::core::MixedLoadControl< T >::increment(), and micromechanical::ChangHicher< T >::macroMicroIntegrate().
◆ integration
| std::shared_ptr<Integration<T> > micromechanical::core::MicromechanicalBase< T >::integration |
gauss integration points
Referenced by micromechanical::core::BestFitAveraging< T >::averageStrain(), micromechanical::core::LoveWeberAveraging< T >::averageStress(), micromechanical::core::KinematicHypothesisLocalization< T >::localizeStrain(), micromechanical::core::StaticHypothesisLocalization< T >::localizeStress(), micromechanical::ChangHicher< T >::macroMicroIntegrate(), and micromechanical::ChangHicher< T >::stiffness().
◆ load
| std::shared_ptr<Load<T> > micromechanical::core::MicromechanicalBase< T >::load |
◆ name
| std::string micromechanical::core::MicromechanicalBase< T >::name = "Undefined" |
name of the model
◆ options
| std::shared_ptr<Options<T> > micromechanical::core::MicromechanicalBase< T >::options = std::shared_ptr<Options<T>>(nullptr) |
options for the micromechanical model
Referenced by micromechanical::ChangHicher< T >::adaptiveIntegrationSubstepping(), micromechanical::core::BestFitAveraging< T >::averageStrain(), micromechanical::core::LoveWeberAveraging< T >::averageStress(), micromechanical::core::MixedLoadControl< T >::checkConvergence(), micromechanical::ChangHicher< T >::contactIntegrate(), micromechanical::core::MixedLoadControl< T >::increment(), micromechanical::core::KinematicHypothesisLocalization< T >::localizeStrain(), micromechanical::core::StaticHypothesisLocalization< T >::localizeStress(), micromechanical::ChangHicher< T >::macroMicroIntegrate(), and micromechanical::ChangHicher< T >::stiffness().
◆ stateVars
| std::vector<StateVariable<T> > micromechanical::core::MicromechanicalBase< T >::stateVars = {} |
state variables of the current run
The documentation for this struct was generated from the following file:
- include/micromechanical/core/micromechanical.hpp