Contact integration points for micromechanical models. More...
#include <integration.hpp>
Public Member Functions | |
| Integration (T npv=1e9, T radius=0.65e-3) | |
| constructor | |
| virtual | ~Integration ()=default |
| destructor | |
| void | initialize (StateVariable< T > &sv) |
| initialize the integration points | |
| void | setGauss37 (bool full=false) |
| set gauss37 integration points | |
| void | setGauss61 (bool full=false) |
| set gauss61 integration points | |
| void | setAnisotropicParameters (std::string type="chang1990-ext", std::string evolution="zhao2020", const std::map< std::string, T > &coefs={}) |
| set the anisotropic parameters | |
| void | setParameters (T npv, T radius) |
| set the parameters | |
| void | setNPVFromVoidRatio (T e) |
| set the number of contacts per unit volume from the void ratio | |
| T | rho () |
| normalized packing density | |
| void | setNPVFromNormalizedPackingDensity (T rho) |
| set the number of contacts per unit volume from the normalized packing density | |
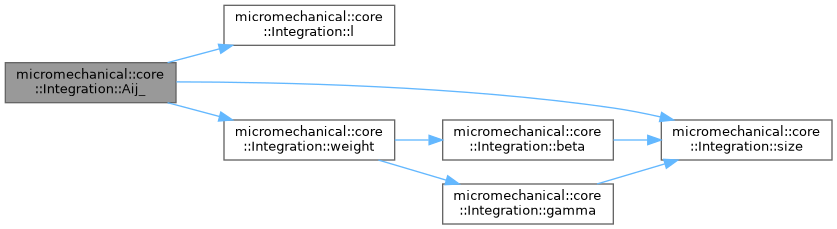
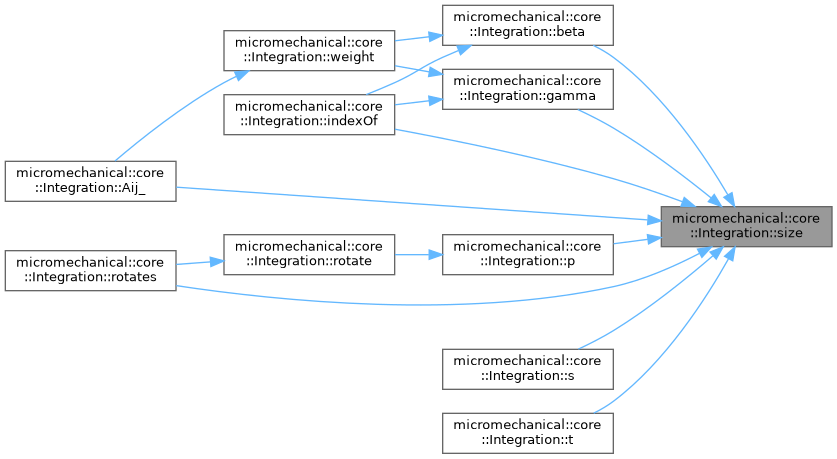
| int | size () const |
| number of integration points | |
| void | reset () |
| reset temporary variables | |
| Eigen::Matrix< T, Eigen::Dynamic, 3 > | s () |
| first shear direction | |
| Eigen::Matrix< T, 3, 1 > | s (int idx) |
| Eigen::Matrix< T, Eigen::Dynamic, 3 > | t () |
| second shear direction | |
| Eigen::Matrix< T, 3, 1 > | t (int idx) |
| Eigen::Matrix< T, Eigen::Dynamic, 1 > | weight () |
| weight | |
| T | weight (int idx) |
| Eigen::Matrix< T, Eigen::Dynamic, 3 > | l () |
| branch vector | |
| Eigen::Matrix< T, 3, 1 > | l (int idx) |
| const Eigen::Matrix< T, 3, 3 > & | p (int idx) |
| transformation matrix | |
| const Eigen::Matrix< T, Eigen::Dynamic, 1 > & | beta () |
| azimuthal angle | |
| T | beta (int idx) |
| const Eigen::Matrix< T, Eigen::Dynamic, 1 > & | gamma () |
| polar angle | |
| T | gamma (int idx) |
| Eigen::Matrix< T, 3, 3 > | rotate (const Eigen::Matrix< T, 3, 3 > &F, int idx) |
| rotate the fabric tensor | |
| std::vector< Eigen::Matrix< T, 3, 3 > > | rotates (const Eigen::Matrix< T, 3, 3 > &F) |
| rotate the fabric tensors | |
| const Eigen::Matrix< T, 3, 3 > & | Aij () |
| fabric tensor | |
| const Eigen::Matrix< T, 3, 3 > & | Aij_ () |
| fabric tensor from definition | |
| std::tuple< Eigen::VectorXi, Eigen::Matrix< T, Eigen::Dynamic, 1 > > | indexOf (T beta=-1.0, T gamma=-1.0, T tol=1e-6) |
| indices of the integration points with the given beta and gamma angles and the corresponding angles. | |
Public Attributes | |
| T | npv = 1e9 |
| number of points per unit volume | |
| T | radius = 0.65e-3 |
| radius of the particle | |
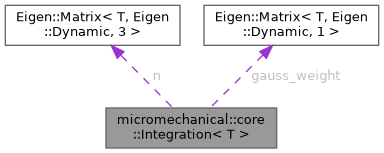
| Eigen::Matrix< T, Eigen::Dynamic, 3 > | n |
| normal vector of the integration points | |
| Eigen::Matrix< T, Eigen::Dynamic, 1 > | gauss_weight |
| weight of the integration points | |
| std::shared_ptr< FabricTensor< T > > | fabric |
| fabric tensor | |
| std::shared_ptr< IntegrationChanged > | changed |
| integration changed flags | |
Detailed Description
struct micromechanical::core::Integration< T >
Contact integration points for micromechanical models.
Constructor & Destructor Documentation
◆ Integration()
|
inlineexplicit |
◆ ~Integration()
|
virtualdefault |
destructor
Member Function Documentation
◆ Aij()
|
inline |
◆ Aij_()
|
inline |
◆ beta() [1/2]
|
inline |


◆ beta() [2/2]
|
inline |
◆ gamma() [1/2]
|
inline |


◆ gamma() [2/2]
|
inline |
◆ indexOf()
|
inline |
indices of the integration points with the given beta and gamma angles and the corresponding angles.
- Parameters
-
beta the angle between the projection of the azimuth on the YZ plane and the Y axis gamma the angle between the azimuth and the X axis tol the tolerance for the comparison of the angles, by default 1e-6
- Returns
- a tuple of the indices and angles
References beta(), gamma(), and size().
◆ initialize()
|
inline |
initialize the integration points
References fabric.
◆ l() [1/2]
|
inline |

◆ l() [2/2]
|
inline |
◆ p()
|
inline |


◆ reset()
|
inline |
reset temporary variables
References changed, and fabric.
Referenced by setGauss37(), and setGauss61().
◆ rho()
|
inline |
normalized packing density
Referenced by setNPVFromNormalizedPackingDensity().

◆ rotate()
|
inline |


◆ rotates()
|
inline |

◆ s() [1/2]
|
inline |

◆ s() [2/2]
|
inline |
◆ setAnisotropicParameters()
|
inline |
set the anisotropic parameters
- Parameters
-
type fabric tensor type evolution evolution type coefs fabric tensor coefficients
◆ setGauss37()
|
inline |
set gauss37 integration points
- Parameters
-
full full 37*2 integration points.
References gauss_weight, n, and reset().

◆ setGauss61()
|
inline |
set gauss61 integration points
- Parameters
-
full full 61*2 integration points.
References gauss_weight, n, and reset().

◆ setNPVFromNormalizedPackingDensity()
|
inline |

◆ setNPVFromVoidRatio()
|
inline |
◆ setParameters()
|
inline |
◆ size()
|
inline |
◆ t() [1/2]
|
inline |

◆ t() [2/2]
|
inline |
◆ weight() [1/2]
|
inline |


◆ weight() [2/2]
|
inline |
Member Data Documentation
◆ changed
| std::shared_ptr<IntegrationChanged> micromechanical::core::Integration< T >::changed |
◆ fabric
| std::shared_ptr<FabricTensor<T> > micromechanical::core::Integration< T >::fabric |
fabric tensor
Referenced by Aij(), initialize(), Integration(), reset(), and weight().
◆ gauss_weight
| Eigen::Matrix<T, Eigen::Dynamic, 1> micromechanical::core::Integration< T >::gauss_weight |
weight of the integration points
Referenced by setGauss37(), setGauss61(), and weight().
◆ n
| Eigen::Matrix<T, Eigen::Dynamic, 3> micromechanical::core::Integration< T >::n |
normal vector of the integration points
Referenced by beta(), gamma(), l(), p(), s(), setGauss37(), setGauss61(), size(), and t().
◆ npv
| T micromechanical::core::Integration< T >::npv = 1e9 |
number of points per unit volume
Referenced by Aij(), Aij_(), Integration(), rho(), setNPVFromNormalizedPackingDensity(), setNPVFromVoidRatio(), and setParameters().
◆ radius
| T micromechanical::core::Integration< T >::radius = 0.65e-3 |
radius of the particle
Referenced by Aij(), Integration(), l(), rho(), setNPVFromNormalizedPackingDensity(), setNPVFromVoidRatio(), and setParameters().
The documentation for this struct was generated from the following file:
- include/micromechanical/core/integration.hpp