Class for the 2nd-order tensor (3, 3) representation. More...
#include <tensor.hpp>
Public Member Functions | |
| Tensor2 (const Eigen::Matrix< T, 3, 3 > &data) | |
| Constructor for the tensor. | |
| virtual | ~Tensor2 ()=default |
| destructor | |
| Eigen::Matrix< T, 6, 1 > | toVector () const |
| Convert the tensor to a vector. | |
| Eigen::Matrix< T, 3, 3 > | mean () const |
| Calculate the mean tensor. | |
| Eigen::Matrix< T, 3, 3 > | deviatoric () const |
| Calculate the deviatoric tensor. | |
| T | I1 () const |
| Calculate the first invariant of the tensor. | |
| T | I2 () const |
| Calculate the second invariant of the tensor. | |
| T | I3 () const |
| Calculate the third invariant of the tensor. | |
| T | J2 () const |
| Calculate the second deviatoric invariant of the tensor. | |
| T | J3 () const |
| Calculate the third deviatoric invariant of the tensor. | |
| Eigen::Matrix< T, 3, 1 > | principals () const |
| Calculate the principal values of the tensor. | |
| T | cos3theta () const |
| Calculate the cosine of 3 times of the Lode angle of the tensor. | |
| T | lode () const |
| Calculate the Lode angle of the tensor. | |
| T | norm () const |
| Calculate the norm of the tensor. | |
| Eigen::Matrix< T, 3, 3 > | normalized () const |
| Calculate the normalized tensor. | |
| Tensor2 | operator+ (const Tensor2 &other) const |
| Add two tensors. | |
| Tensor2 | operator+ (const Eigen::Matrix< T, 3, 3 > &other) const |
| Add a matrix to the tensor. | |
| Tensor2 | operator+ (const T &other) const |
| Add a scalar to the tensor. | |
| Tensor2 | operator- (const Tensor2 &other) const |
| Subtract two tensors. | |
| Tensor2 | operator- (const Eigen::Matrix< T, 3, 3 > &other) const |
| Subtract a matrix from the tensor. | |
| Tensor2 | operator- (const T &other) const |
| Subtract a scalar from the tensor. | |
| Tensor2 | operator* (const Tensor2 &other) const |
| Multiply the tensor by a tensor. | |
| Tensor2 | operator* (const Eigen::Matrix< T, 3, 3 > &other) const |
| Multiply the tensor by a matrix. | |
| Eigen::Matrix< T, 3, 1 > | operator* (const Eigen::Matrix< T, 3, 1 > &other) const |
| Multiply the tensor by a vector. | |
| Tensor2 | operator* (const T &other) const |
| Multiply the tensor by a scalar. | |
| Tensor2 | operator/ (const T &other) const |
| Divide the tensor by a scalar. | |
Static Public Member Functions | |
| static Tensor2 | fromVector (const Eigen::Matrix< T, 6, 1 > &vec) |
| Static method to create a tensor from a vector. | |
Public Attributes | |
| Eigen::Matrix< T, 3, 3 > | matrix |
| Matrix representation of the tensor. | |
Detailed Description
struct micromechanical::core::Tensor2< T >
Class for the 2nd-order tensor (3, 3) representation.
Constructor & Destructor Documentation
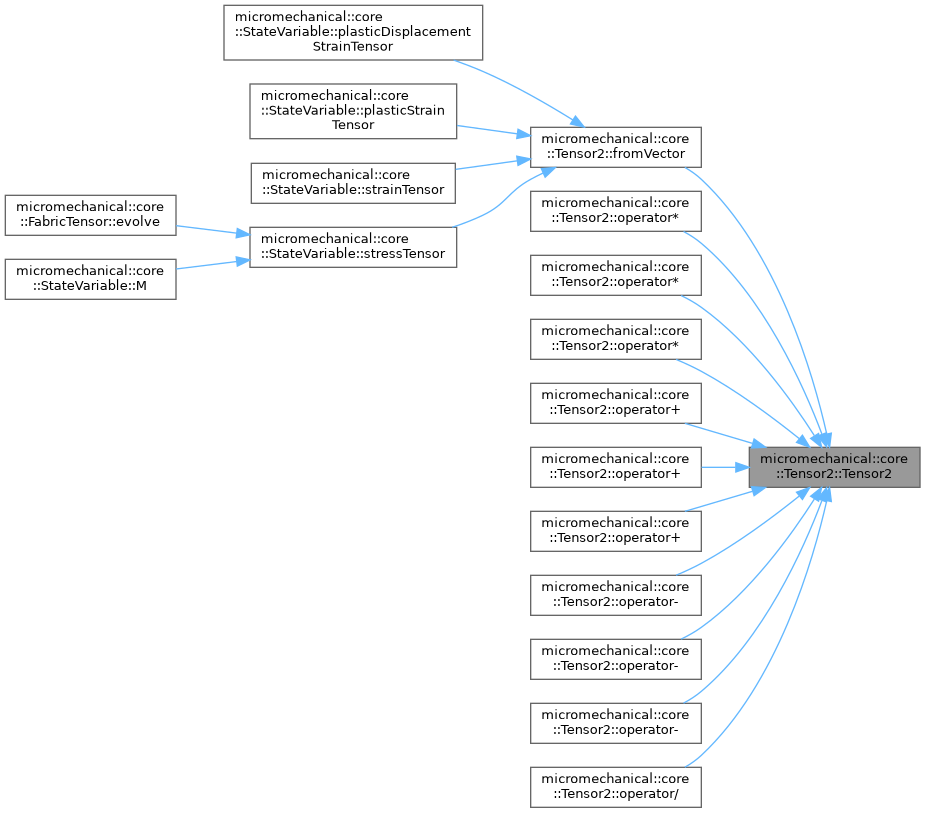
◆ Tensor2()
|
inlineexplicit |
Constructor for the tensor.
- Parameters
-
data Matrix representation of the tensor.
References matrix.
Referenced by fromVector(), operator*(), operator*(), operator*(), operator+(), operator+(), operator+(), operator-(), operator-(), operator-(), and operator/().
◆ ~Tensor2()
|
virtualdefault |
destructor
Member Function Documentation
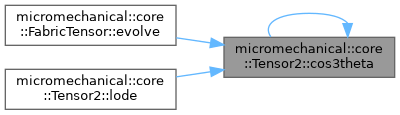
◆ cos3theta()
|
inline |
Calculate the cosine of 3 times of the Lode angle of the tensor.
- Returns
- Cosine of 3 times of the Lode angle of the tensor.
References cos3theta(), J2(), and J3().
Referenced by cos3theta(), micromechanical::core::FabricTensor< T >::evolve(), and lode().

◆ deviatoric()
|
inline |


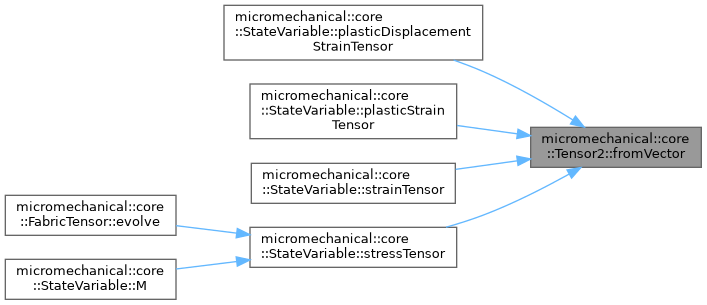
◆ fromVector()
|
inlinestatic |
Static method to create a tensor from a vector.
- Parameters
-
vec Vector representation of the tensor.
- Returns
- Tensor representation of the vector.
References matrix, and Tensor2().
Referenced by micromechanical::core::StateVariable< T >::plasticDisplacementStrainTensor(), micromechanical::core::StateVariable< T >::plasticStrainTensor(), micromechanical::core::StateVariable< T >::strainTensor(), and micromechanical::core::StateVariable< T >::stressTensor().

◆ I1()
|
inline |
Calculate the first invariant of the tensor.
- Returns
- First invariant of the tensor.
◆ I2()
|
inline |
Calculate the second invariant of the tensor.
- Returns
- Second invariant of the tensor.
◆ I3()
|
inline |
Calculate the third invariant of the tensor.
- Returns
- Third invariant of the tensor.
◆ J2()
|
inline |
Calculate the second deviatoric invariant of the tensor.
- Returns
- Second deviatoric invariant of the tensor.
References deviatoric().
Referenced by cos3theta().


◆ J3()
|
inline |
Calculate the third deviatoric invariant of the tensor.
- Returns
- Third deviatoric invariant of the tensor.
References deviatoric().
Referenced by cos3theta().


◆ lode()
|
inline |
Calculate the Lode angle of the tensor.
- Returns
- Lode angle of the tensor.
References cos3theta().

◆ mean()
|
inline |
Calculate the mean tensor.
- Returns
- Mean tensor.
Referenced by deviatoric().

◆ norm()
|
inline |
Calculate the norm of the tensor.
- Returns
- Norm of the tensor.
◆ normalized()
|
inline |
Calculate the normalized tensor.
- Returns
- Normalized tensor.
◆ operator*() [1/4]
|
inline |
Multiply the tensor by a vector.
- Parameters
-
other Vector to be multiplied.
- Returns
- Product of the tensor and the vector.
◆ operator*() [2/4]
|
inline |
Multiply the tensor by a matrix.
- Parameters
-
other Matrix to be multiplied.
- Returns
- Product of the tensor and the matrix.
References Tensor2().

◆ operator*() [3/4]
|
inline |

◆ operator*() [4/4]
|
inline |

◆ operator+() [1/3]
|
inline |
Add a matrix to the tensor.
- Parameters
-
other Matrix to be added.
- Returns
- Sum of the tensor and the matrix.
References Tensor2().

◆ operator+() [2/3]
|
inline |

◆ operator+() [3/3]
|
inline |

◆ operator-() [1/3]
|
inline |
Subtract a matrix from the tensor.
- Parameters
-
other Matrix to be subtracted.
- Returns
- Difference of the tensor and the matrix.
References Tensor2().

◆ operator-() [2/3]
|
inline |

◆ operator-() [3/3]
|
inline |

◆ operator/()
|
inline |

◆ principals()
|
inline |
Calculate the principal values of the tensor.
- Returns
- Principal values of the tensor.
◆ toVector()
|
inline |
Member Data Documentation
◆ matrix
| Eigen::Matrix<T, 3, 3> micromechanical::core::Tensor2< T >::matrix |
Matrix representation of the tensor.
Referenced by fromVector(), micromechanical::core::operator*(), micromechanical::core::operator*(), micromechanical::core::operator*(), operator*(), micromechanical::core::operator+(), micromechanical::core::operator+(), operator+(), micromechanical::core::operator-(), micromechanical::core::operator-(), operator-(), Tensor2(), and toVector().
The documentation for this struct was generated from the following file:
- include/micromechanical/core/tensor.hpp