Base class for elastoplastic contact laws. More...
#include <contactlaw.hpp>
Public Member Functions | |
| void | setPlasticMethod (const std::string &method) |
| set the plastic method | |
| Eigen::Matrix< T, Eigen::Dynamic, Eigen::Dynamic > | yieldSurfaces (int idx, const Eigen::Matrix< T, Eigen::Dynamic, Eigen::Dynamic > &fn, const Eigen::Matrix< T, Eigen::Dynamic, Eigen::Dynamic > &fr, const StateVariable< T > &sv0, StateVariable< T > &sv) |
| Calculate yield function for multiple times. | |
 Public Member Functions inherited from micromechanical::core::ContactLawBase< T > Public Member Functions inherited from micromechanical::core::ContactLawBase< T > | |
| ContactLawBase (const std::map< std::string, T > &props={}) | |
| constructor | |
| virtual | ~ContactLawBase ()=default |
| destructor | |
| virtual std::vector< std::string > | symmetricContactScalars () |
| Symmetric contact scalar variables. | |
| virtual std::vector< std::string > | symmetricContactVectors () |
| Symmetric contact vector variables. | |
| virtual void | initialize (StateVariable< T > &sv) |
| initialize the contact law | |
| ContactLawBase & | operator= (const ContactLawBase &other) |
| move operator | |
| T | frictionCoefficient (int idx, const StateVariable< T > &sv0, const StateVariable< T > &sv) |
| calculate the friction coefficient combined with different criteria | |
| Eigen::Matrix< T, 3, 3 > | forceDisplacement (int idx, Eigen::Matrix< T, 3, 1 > &ddisp, Eigen::Matrix< T, 3, 3 > &Ke, const StateVariable< T > &sv0, StateVariable< T > &sv) |
| integrate the force-displacement relation | |
| virtual Eigen::Matrix< T, 3, 3 > | elasticStiffness (int idx, T fn, const StateVariable< T > &sv0, const StateVariable< T > &sv)=0 |
| Calculate the elastic stiffness matrix. | |
Public Attributes | |
| std::string | plasticMethod = "CPA" |
| Plastic method. | |
| std::string | type = "Elastoplastic" |
| Type of the contact law. | |
| Public Attributes inherited from micromechanical::core::ContactLawBase< T > | |
| std::shared_ptr< Material< T > > | material |
| Material properties. | |
| std::string | name = "Undefined" |
| Name of the contact law. | |
| std::string | type = "Undefined" |
| Type of the contact law. | |
| int | nstatev_custom = 0 |
| Number of custom state variables. | |
| bool | plastic_displacement = false |
| Flag to save the plastic displacement in the state variables. | |
| std::shared_ptr< Options< T > > | options = std::shared_ptr<Options<T>>(new Options<T>()) |
| options for the micromechanical model | |
| std::shared_ptr< DebugVariable< T > > | debugVariable = std::shared_ptr<DebugVariable<T>>(new DebugVariable<T>()) |
| debug variable | |
| int | _phase = 0 |
| index of the phase | |
| int | _step = 0 |
| current step | |
| int | _mixedLoad = 0 |
| number of mixed load steps | |
| int | _integration = 0 |
| number of integration steps | |
| int | _increment = 0 |
| number of contact increments | |
| int | _plasticCorrection = 0 |
| number of contact plastic corrections | |
Protected Member Functions | |
| bool | isExplicit () const |
| check if the plastic method is explicit | |
| bool | isCPA () const |
| check if the plastic method is CPA | |
| bool | isCPPM () const |
| check if the plastic method is CPPM | |
| Eigen::Matrix< T, 3, 3 > | integrate (int idx, const Eigen::Matrix< T, 3, 1 > &ddisp, const Eigen::Matrix< T, 3, 3 > &Ke, const StateVariable< T > &sv0, StateVariable< T > &sv) override |
| integrate the force-displacement contact law, with a number of increments. | |
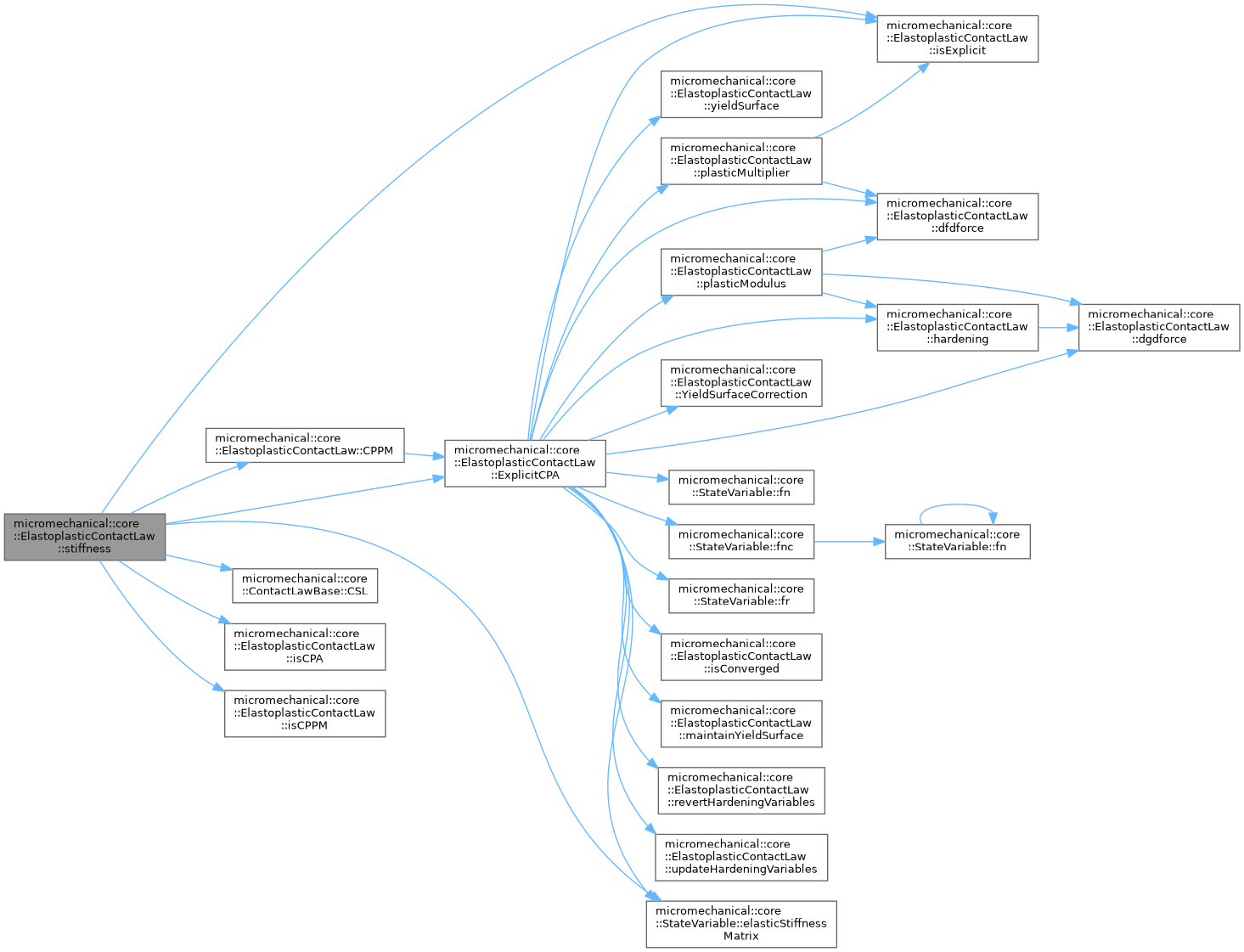
| Eigen::Matrix< T, 3, 3 > | stiffness (int idx, const Eigen::Matrix< T, 3, 1 > &ddisp, const StateVariable< T > &sv0, StateVariable< T > &sv) override |
| calculate the elastoplastic stiffness matrix | |
| virtual bool | isConverged (int idx, T f, bool trial, const StateVariable< T > &sv0, StateVariable< T > &sv) |
| Determine whether the contact force state is converged to the yield surface or the force state is in the elastic region. | |
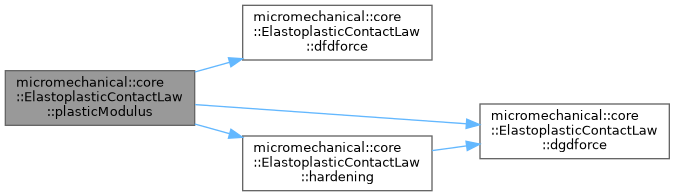
| virtual T | plasticModulus (int idx, const Eigen::Matrix< T, 3, 3 > &Ke, const Eigen::Matrix< T, 3, 1 > &dfdforce, const Eigen::Matrix< T, 3, 1 > &dgdforce, T hardening, const StateVariable< T > &sv0, StateVariable< T > &sv) |
| Calculate the plastic modulus. | |
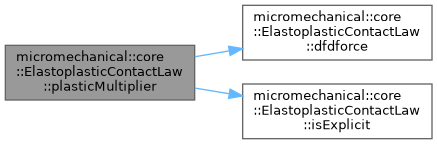
| virtual T | plasticMultiplier (int idx, T f, const Eigen::Matrix< T, 3, 3 > &Ke, const Eigen::Matrix< T, 3, 1 > &ddisp, const Eigen::Matrix< T, 3, 1 > &dfdforce, T Kp, const StateVariable< T > &sv0, StateVariable< T > &sv) |
| Calculate the plastic multiplier. | |
| Eigen::Matrix< T, 3, 3 > | ExplicitCPA (int idx, const Eigen::Matrix< T, 3, 1 > &ddisp, const StateVariable< T > &sv0, StateVariable< T > &sv) |
| Explicit method for elastoplastic contact laws. | |
| Eigen::Matrix< T, 3, 3 > | CPPM (int idx, const Eigen::Matrix< T, 3, 1 > &ddisp, const StateVariable< T > &sv0, StateVariable< T > &sv) |
| CPPM method for elastoplastic contact laws. | |
| virtual T | yieldSurface (int idx, T fn, T fr, const StateVariable< T > &sv0, StateVariable< T > &sv)=0 |
| Yield function for elastoplastic contact laws. | |
| virtual Eigen::Matrix< T, 3, 1 > | dfdforce (int idx, const StateVariable< T > &sv0, StateVariable< T > &sv)=0 |
| Derivative of the yield function with respect to the force. | |
| virtual Eigen::Matrix< T, 3, 1 > | dgdforce (int idx, const StateVariable< T > &sv0, StateVariable< T > &sv)=0 |
| Derivative of the potential function with respect to the force. | |
| virtual T | hardening (int idx, const Eigen::Matrix< T, 3, 1 > &dgdforce, const StateVariable< T > &sv0, StateVariable< T > &sv)=0 |
| Hardening items for elastoplastic contact laws. | |
| virtual void | updateHardeningVariables (int idx, T dlambda, const Eigen::Matrix< T, 3, 1 > &ddispp, const StateVariable< T > &sv0, StateVariable< T > &sv)=0 |
| Update the hardening variables. | |
| virtual void | revertHardeningVariables (int idx, T dlambda, const Eigen::Matrix< T, 3, 1 > &ddispp, const StateVariable< T > &sv0, StateVariable< T > &sv) |
| Revert the hardening variables. | |
| virtual void | YieldSurfaceCorrection (int idx, const StateVariable< T > &sv0, StateVariable< T > &sv) |
| Yield surface correction to keep the force state on the yield surface. | |
| virtual void | maintainYieldSurface (int idx, const Eigen::Matrix< T, 3, 1 > &ddisp, const Eigen::Matrix< T, 3, 1 > &dforce, const StateVariable< T > &sv0, StateVariable< T > &sv) |
| Revert state variables from elastic state to maintain the force state on the yield surface. | |
| Protected Member Functions inherited from micromechanical::core::ContactLawBase< T > | |
| Eigen::Matrix< T, 3, 3 > | increment (int idx, const Eigen::Matrix< T, 3, 1 > &ddisp, const Eigen::Matrix< T, 3, 3 > &Ke, const StateVariable< T > &sv0, StateVariable< T > &sv) |
| Calculate one increment. | |
| virtual void | check (int idx, const Eigen::Matrix< T, 3, 1 > &ddisp, const StateVariable< T > &sv0, StateVariable< T > &sv) |
| check the convergence of the contact law | |
| virtual void | preIntegration (int idx, const Eigen::Matrix< T, 3, 1 > &ddisp, const StateVariable< T > &sv0, StateVariable< T > &sv) |
| pre-processing before the integration | |
| virtual void | postIntegration (int idx, const Eigen::Matrix< T, 3, 1 > &ddisp, const StateVariable< T > &sv0, StateVariable< T > &sv) |
| post-processing after the integration | |
| virtual void | preIncrement (int idx, const Eigen::Matrix< T, 3, 1 > &ddisp, const StateVariable< T > &sv0, StateVariable< T > &sv) |
| pre-processing before the increment | |
| virtual void | postIncrement (int idx, const Eigen::Matrix< T, 3, 1 > &ddisp, const StateVariable< T > &sv0, StateVariable< T > &sv) |
| post-processing after the increment | |
| virtual T | CSL (int idx, const StateVariable< T > &sv0, StateVariable< T > &sv) |
| calculate the critical state line | |
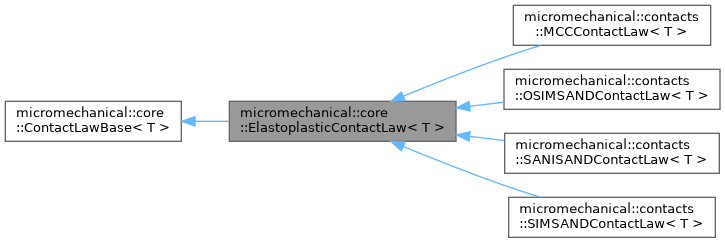
Detailed Description
struct micromechanical::core::ElastoplasticContactLaw< T >
Base class for elastoplastic contact laws.
Member Function Documentation
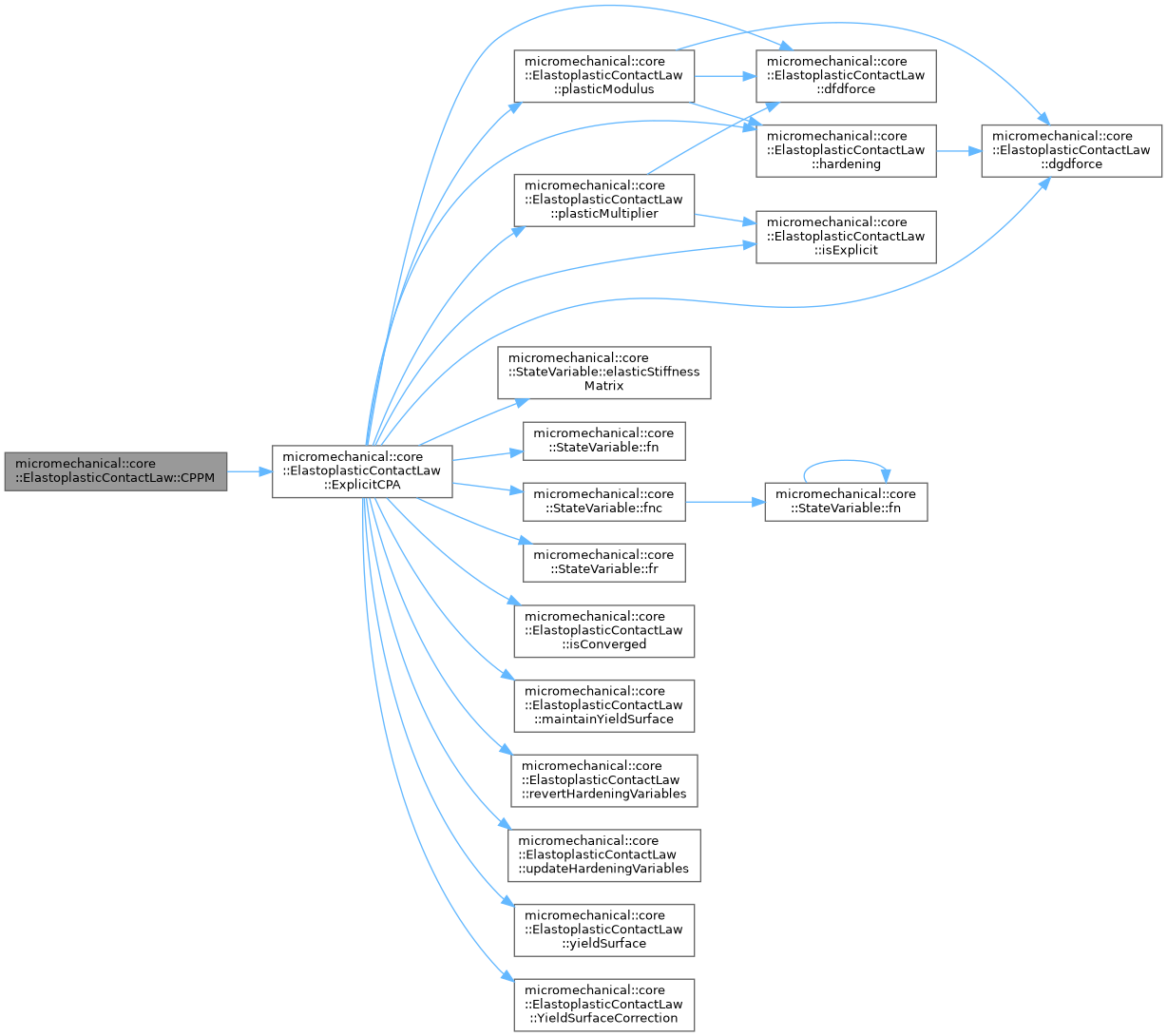
◆ CPPM()
|
inlineprotected |
CPPM method for elastoplastic contact laws.
- Parameters
-
idx index of the integration point ddisp displacement increment sv0 initial state variable sv state variable
- Returns
- the elastoplastic stiffness matrix
- Todo
- the CPPM method is not implemented yet, fall back to the CPA method
References ExplicitCPA().
Referenced by stiffness().

◆ dfdforce()
|
protectedpure virtual |
Derivative of the yield function with respect to the force.
- Parameters
-
idx index of the integration point sv0 initial state variable sv state variable
- Returns
- the derivative of the yield function with respect to the force
Implemented in micromechanical::contacts::MCCContactLaw< T >, micromechanical::contacts::OSIMSANDContactLaw< T >, micromechanical::contacts::SANISANDContactLaw< T >, and micromechanical::contacts::SIMSANDContactLaw< T >.
Referenced by ExplicitCPA(), plasticModulus(), and plasticMultiplier().

◆ dgdforce()
|
protectedpure virtual |
Derivative of the potential function with respect to the force.
- Parameters
-
idx index of the integration point sv0 initial state variable sv state variable
- Returns
- the derivative of the potential function with respect to the force
Implemented in micromechanical::contacts::MCCContactLaw< T >, micromechanical::contacts::OSIMSANDContactLaw< T >, micromechanical::contacts::SANISANDContactLaw< T >, and micromechanical::contacts::SIMSANDContactLaw< T >.
Referenced by ExplicitCPA(), hardening(), and plasticModulus().

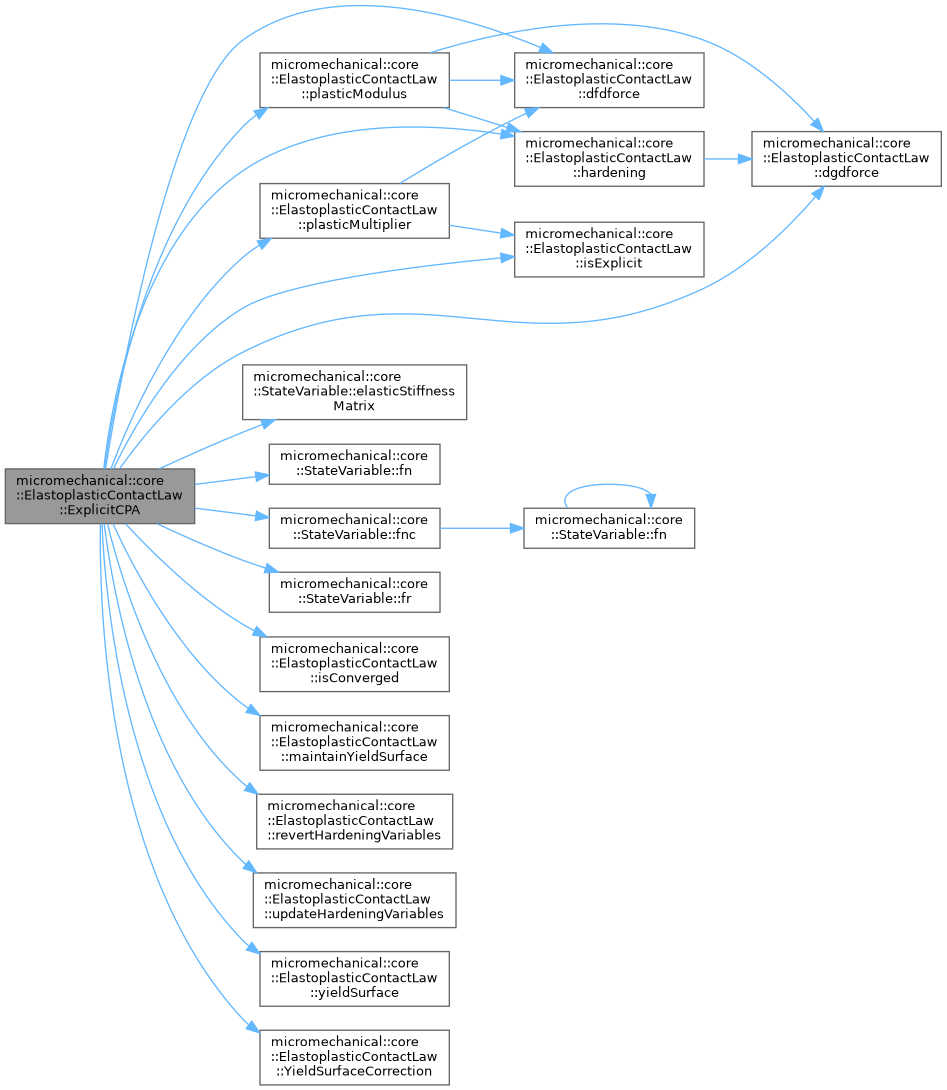
◆ ExplicitCPA()
|
inlineprotected |
Explicit method for elastoplastic contact laws.
- Parameters
-
idx index of the integration point ddisp displacement increment sv0 initial state variable sv state variable
- Returns
- the elastoplastic stiffness matrix
References micromechanical::core::ContactLawBase< T >::_increment, micromechanical::core::ContactLawBase< T >::_integration, micromechanical::core::ContactLawBase< T >::_mixedLoad, micromechanical::core::ContactLawBase< T >::_phase, micromechanical::core::ContactLawBase< T >::_plasticCorrection, micromechanical::core::ContactLawBase< T >::_step, micromechanical::core::StateVariable< T >::cscalars, micromechanical::core::ContactLawBase< T >::debugVariable, dfdforce(), dgdforce(), micromechanical::core::StateVariable< T >::disp, micromechanical::core::StateVariable< T >::dispp, micromechanical::core::StateVariable< T >::elasticStiffnessMatrix(), micromechanical::core::StateVariable< T >::fn(), micromechanical::core::StateVariable< T >::fnc(), micromechanical::core::StateVariable< T >::force, micromechanical::core::StateVariable< T >::fr(), hardening(), isConverged(), isExplicit(), maintainYieldSurface(), micromechanical::core::ContactLawBase< T >::material, micromechanical::core::ContactLawBase< T >::options, plasticModulus(), plasticMultiplier(), revertHardeningVariables(), updateHardeningVariables(), micromechanical::core::StateVariable< T >::vectors, micromechanical::core::StateVariable< T >::w, yieldSurface(), and YieldSurfaceCorrection().
Referenced by CPPM(), and stiffness().

◆ hardening()
|
protectedpure virtual |
Hardening items for elastoplastic contact laws.
- Parameters
-
idx index of the integration point dgdforce derivative of the potential function with respect to the force sv0 initial state variable sv state variable
- Returns
- the hardening items
Implemented in micromechanical::contacts::MCCContactLaw< T >, micromechanical::contacts::OSIMSANDContactLaw< T >, micromechanical::contacts::SANISANDContactLaw< T >, and micromechanical::contacts::SIMSANDContactLaw< T >.
References dgdforce().
Referenced by ExplicitCPA(), and plasticModulus().


◆ integrate()
|
inlineoverrideprotectedvirtual |
integrate the force-displacement contact law, with a number of increments.
- Parameters
-
idx index of the integration point ddisp displacement increment Ke elastic stiffness matrix sv0 initial state variable sv state variable
- Returns
- the elastoplastic stiffness matrix
Implements micromechanical::core::ContactLawBase< T >.
References micromechanical::core::ContactLawBase< T >::_increment, and micromechanical::core::ContactLawBase< T >::increment().

◆ isConverged()
|
inlineprotectedvirtual |
Determine whether the contact force state is converged to the yield surface or the force state is in the elastic region.
- Parameters
-
idx index of the integration point f yield function value trial whether it is for elastic trial sv0 initial state variable sv state variable
- Returns
- whether the contact force state is converged to the yield surface or the force state is in the elastic region
References micromechanical::core::ContactLawBase< T >::options.
Referenced by ExplicitCPA().

◆ isCPA()
|
inlineprotected |
check if the plastic method is CPA
- Returns
- true if the plastic method is CPA, false otherwise
Referenced by stiffness().

◆ isCPPM()
|
inlineprotected |
check if the plastic method is CPPM
- Returns
- true if the plastic method is CPPM, false otherwise
Referenced by stiffness().

◆ isExplicit()
|
inlineprotected |
check if the plastic method is explicit
- Returns
- true if the plastic method is explicit, false otherwise
Referenced by ExplicitCPA(), plasticMultiplier(), and stiffness().

◆ maintainYieldSurface()
|
inlineprotectedvirtual |
Revert state variables from elastic state to maintain the force state on the yield surface.
- Parameters
-
idx index of the integration point ddisp displacement increment dforce force increment sv0 initial state variable sv state variable
Reimplemented in micromechanical::contacts::SANISANDContactLaw< T >.
Referenced by ExplicitCPA().

◆ plasticModulus()
|
inlineprotectedvirtual |
Calculate the plastic modulus.
- Parameters
-
idx index of the integration point Ke elastic stiffness matrix dfdforce derivative of the yield function with respect to the force dgdforce derivative of the hardening variable with respect to the force hardening hardening item sv0 initial state variable sv current state variable
- Returns
- the plastic modulus
References dfdforce(), dgdforce(), and hardening().
Referenced by ExplicitCPA().

◆ plasticMultiplier()
|
inlineprotectedvirtual |
Calculate the plastic multiplier.
- Parameters
-
idx Index of the integration point f Yield function value Ke Elastic stiffness matrix ddisp Displacement increment dfdforce Derivative of the yield function with respect to the force Kp Plastic modulus sv0 Initial state variables sv Current state variables
- Returns
- Plastic multiplier
References dfdforce(), and isExplicit().
Referenced by ExplicitCPA().

◆ revertHardeningVariables()
|
inlineprotectedvirtual |
Revert the hardening variables.
- Parameters
-
idx index of the integration point dlambda plastic multiplier ddispp plastic displacement increment sv0 initial state variable sv state variable
Referenced by ExplicitCPA().

◆ setPlasticMethod()
|
inline |
set the plastic method
- Parameters
-
method plastic method, "Explicit", "CPA", or "CPPM"
◆ stiffness()
|
inlineoverrideprotectedvirtual |
calculate the elastoplastic stiffness matrix
- Parameters
-
idx index of the integration point ddisp displacement increment sv0 initial state variable sv state variable
- Returns
- the elastoplastic stiffness matrix
Implements micromechanical::core::ContactLawBase< T >.
References CPPM(), micromechanical::core::ContactLawBase< T >::CSL(), micromechanical::core::StateVariable< T >::ec, micromechanical::core::StateVariable< T >::elasticStiffnessMatrix(), ExplicitCPA(), micromechanical::core::StateVariable< T >::force, isCPA(), isCPPM(), isExplicit(), and micromechanical::core::StateVariable< T >::vectors.
◆ updateHardeningVariables()
|
protectedpure virtual |
Update the hardening variables.
- Parameters
-
idx index of the integration point dlambda plastic multiplier ddispp plastic displacement increment sv0 initial state variable sv state variable
Implemented in micromechanical::contacts::MCCContactLaw< T >, micromechanical::contacts::OSIMSANDContactLaw< T >, micromechanical::contacts::SANISANDContactLaw< T >, and micromechanical::contacts::SIMSANDContactLaw< T >.
Referenced by ExplicitCPA().

◆ yieldSurface()
|
protectedpure virtual |
Yield function for elastoplastic contact laws.
- Parameters
-
idx index of the integration point fn normal force fr shear force sv0 initial state variable sv state variable
- Returns
- the yield function
Implemented in micromechanical::contacts::MCCContactLaw< T >, micromechanical::contacts::OSIMSANDContactLaw< T >, micromechanical::contacts::SANISANDContactLaw< T >, and micromechanical::contacts::SIMSANDContactLaw< T >.
Referenced by ExplicitCPA(), and yieldSurfaces().

◆ YieldSurfaceCorrection()
|
inlineprotectedvirtual |
Yield surface correction to keep the force state on the yield surface.
- Parameters
-
idx index of the integration point sv0 initial state variable sv state variable
Referenced by ExplicitCPA().

◆ yieldSurfaces()
|
inline |
Calculate yield function for multiple times.
- Parameters
-
idx index of the integration point fn normal force fr shear force sv0 initial state variable sv state variable
- Returns
- the yield function
References yieldSurface().

Member Data Documentation
◆ plasticMethod
| std::string micromechanical::core::ElastoplasticContactLaw< T >::plasticMethod = "CPA" |
Plastic method.
◆ type
| std::string micromechanical::core::ElastoplasticContactLaw< T >::type = "Elastoplastic" |
Type of the contact law.
The documentation for this struct was generated from the following file:
- include/micromechanical/core/contactlaw.hpp