Functions | |
| template<typename T> | |
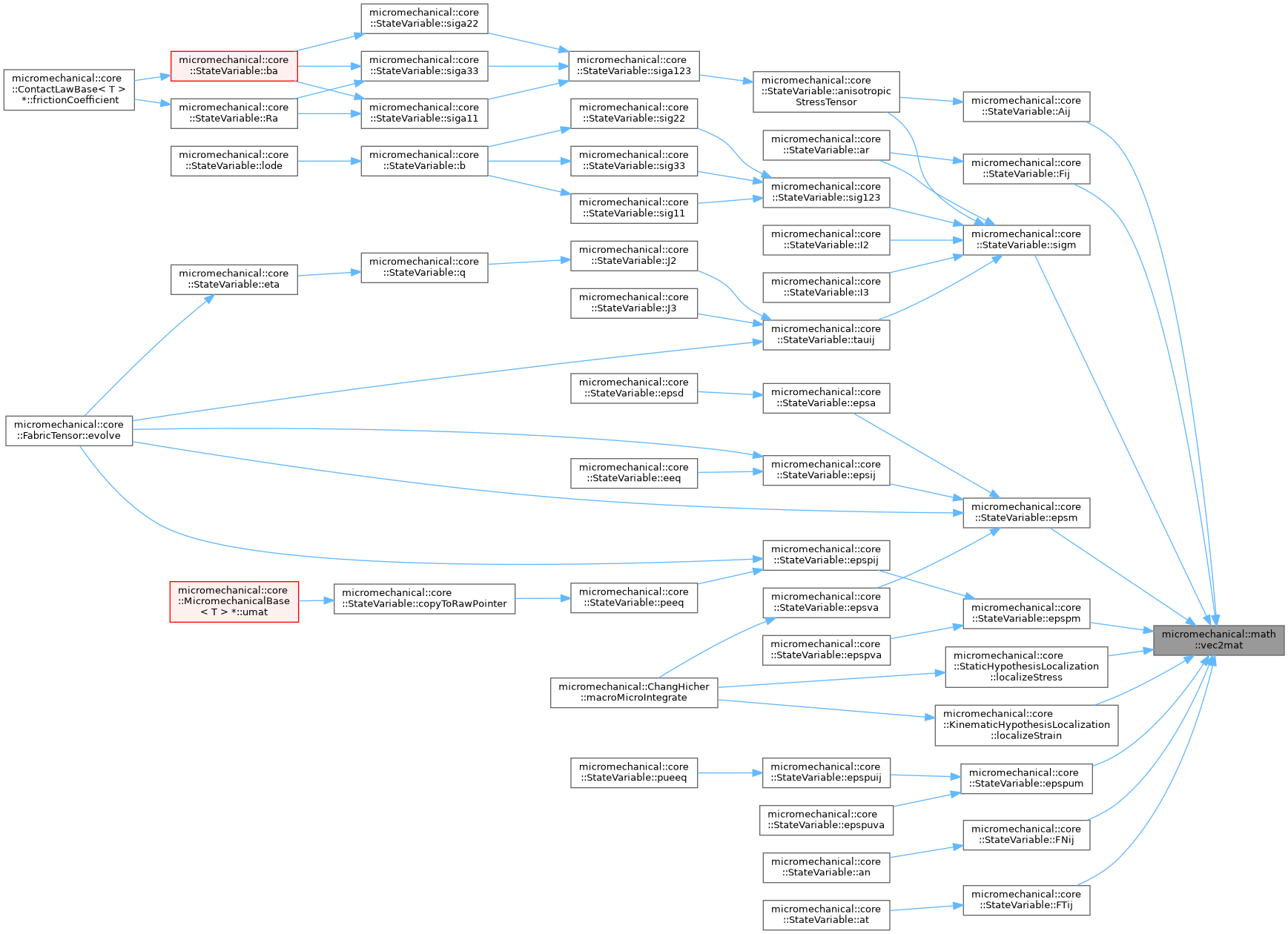
| Eigen::Matrix< T, 3, 3 > | vec2mat (const Eigen::Matrix< T, 6, 1 > &vector) |
| Convert a 6x1 vector to a 3x3 matrix. | |
| template Eigen::Matrix< float, 3, 3 > | vec2mat (const Eigen::Matrix< float, 6, 1 > &vector) |
| template Eigen::Matrix< double, 3, 3 > | vec2mat (const Eigen::Matrix< double, 6, 1 > &vector) |
| template<typename T> | |
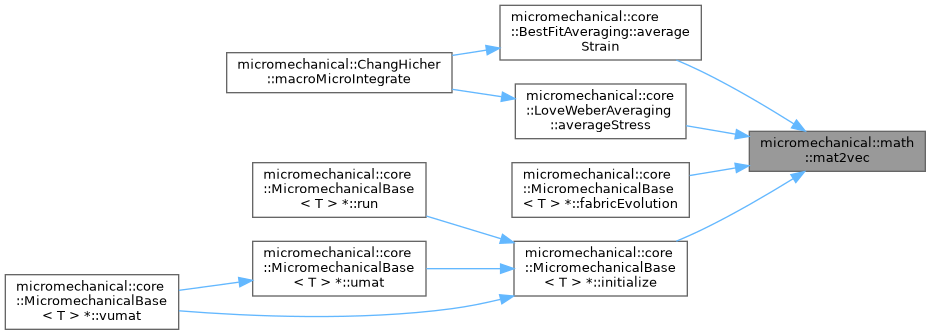
| Eigen::Matrix< T, 6, 1 > | mat2vec (const Eigen::Matrix< T, 3, 3 > &matrix) |
| Convert a 3x3 matrix to a 6x1 vector. | |
| template Eigen::Matrix< float, 6, 1 > | mat2vec (const Eigen::Matrix< float, 3, 3 > &matrix) |
| template Eigen::Matrix< double, 6, 1 > | mat2vec (const Eigen::Matrix< double, 3, 3 > &matrix) |
| template<typename T> | |
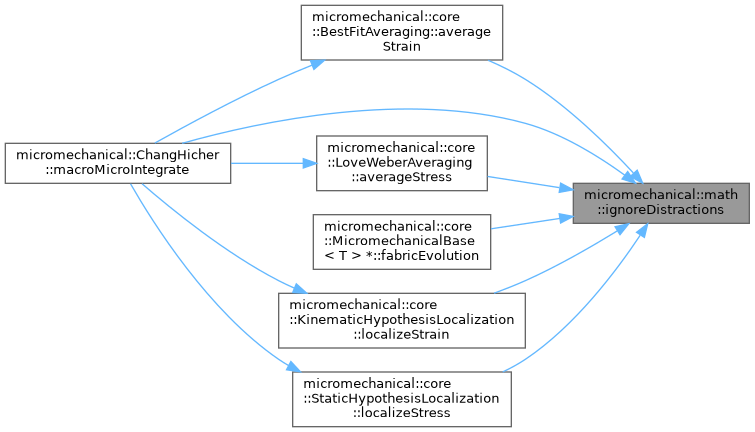
| Eigen::Matrix< T, Eigen::Dynamic, Eigen::Dynamic > | ignoreDistractions (Eigen::Matrix< T, Eigen::Dynamic, Eigen::Dynamic > data, const T &ignored_value=0.0, const T &tol=1e-5) |
| Ignore data distractions. | |
| template Eigen::Matrix< float, Eigen::Dynamic, Eigen::Dynamic > | ignoreDistractions (Eigen::Matrix< float, Eigen::Dynamic, Eigen::Dynamic > data, const float &ignored_value, const float &tol) |
| template Eigen::Matrix< double, Eigen::Dynamic, Eigen::Dynamic > | ignoreDistractions (Eigen::Matrix< double, Eigen::Dynamic, Eigen::Dynamic > data, const double &ignored_value, const double &tol) |
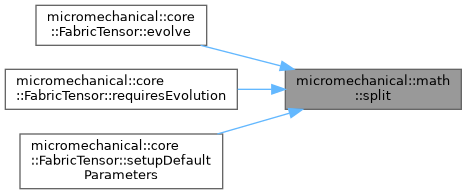
| std::vector< std::string > | split (const std::string &string, const std::string &delimiter) |
| Split a string by a delimiter. | |
Function Documentation
◆ ignoreDistractions() [1/3]
| template Eigen::Matrix< double, Eigen::Dynamic, Eigen::Dynamic > micromechanical::math::ignoreDistractions | ( | Eigen::Matrix< double, Eigen::Dynamic, Eigen::Dynamic > | data, |
| const double & | ignored_value, | ||
| const double & | tol ) |
◆ ignoreDistractions() [2/3]
| template Eigen::Matrix< float, Eigen::Dynamic, Eigen::Dynamic > micromechanical::math::ignoreDistractions | ( | Eigen::Matrix< float, Eigen::Dynamic, Eigen::Dynamic > | data, |
| const float & | ignored_value, | ||
| const float & | tol ) |
◆ ignoreDistractions() [3/3]
|
inline |
Ignore data distractions.
- Parameters
-
data A 2D matrix ignored_value The value to be set for distractions tol The tolerance
- Returns
- A 2D matrix
Referenced by micromechanical::core::BestFitAveraging< T >::averageStrain(), micromechanical::core::LoveWeberAveraging< T >::averageStress(), micromechanical::core::MicromechanicalBase< T > *::fabricEvolution(), micromechanical::core::KinematicHypothesisLocalization< T >::localizeStrain(), micromechanical::core::StaticHypothesisLocalization< T >::localizeStress(), and micromechanical::ChangHicher< T >::macroMicroIntegrate().
◆ mat2vec() [1/3]
| template Eigen::Matrix< double, 6, 1 > micromechanical::math::mat2vec | ( | const Eigen::Matrix< double, 3, 3 > & | matrix | ) |
◆ mat2vec() [2/3]
| template Eigen::Matrix< float, 6, 1 > micromechanical::math::mat2vec | ( | const Eigen::Matrix< float, 3, 3 > & | matrix | ) |
◆ mat2vec() [3/3]
|
inline |
Convert a 3x3 matrix to a 6x1 vector.
- Parameters
-
matrix A 3x3 matrix
- Returns
- A 6x1 vector
Referenced by micromechanical::core::BestFitAveraging< T >::averageStrain(), micromechanical::core::LoveWeberAveraging< T >::averageStress(), micromechanical::core::MicromechanicalBase< T > *::fabricEvolution(), and micromechanical::core::MicromechanicalBase< T > *::initialize().
◆ split()
|
inline |
Split a string by a delimiter.
- Parameters
-
string string to split delimiter delimiter
- Returns
- vector of strings
Referenced by micromechanical::core::FabricTensor< T >::evolve(), micromechanical::core::FabricTensor< T >::requiresEvolution(), and micromechanical::core::FabricTensor< T >::setupDefaultParameters().
◆ vec2mat() [1/3]
| template Eigen::Matrix< double, 3, 3 > micromechanical::math::vec2mat | ( | const Eigen::Matrix< double, 6, 1 > & | vector | ) |
◆ vec2mat() [2/3]
| template Eigen::Matrix< float, 3, 3 > micromechanical::math::vec2mat | ( | const Eigen::Matrix< float, 6, 1 > & | vector | ) |
◆ vec2mat() [3/3]
|
inline |
Convert a 6x1 vector to a 3x3 matrix.
- Parameters
-
vector A 6x1 vector
- Returns
- A 3x3 matrix
Referenced by micromechanical::core::StateVariable< T >::Aij(), micromechanical::core::StateVariable< T >::epsm(), micromechanical::core::StateVariable< T >::epspm(), micromechanical::core::StateVariable< T >::epspum(), micromechanical::core::StateVariable< T >::Fij(), micromechanical::core::StateVariable< T >::FNij(), micromechanical::core::StateVariable< T >::FTij(), micromechanical::core::KinematicHypothesisLocalization< T >::localizeStrain(), micromechanical::core::StaticHypothesisLocalization< T >::localizeStress(), and micromechanical::core::StateVariable< T >::sigm().